TronXY X5S die 2.
Ist schon paar Tage her, daß ich einen ersten Eindruck hier dargelegt habe. Zwischenzeitlich war ich kurz davor den Kram zu entsorgen. Stephan scheint bereits an den Senkungen für die Inbus-Senkkopfschrauben an den Aluprofilen gescheitert zu sein. Zum Glück hat sich Peter hinzugesellt und mir wieder die Motivation gegeben die Baustelle zum Ende zu bringen. Nur gut, daß es mir nicht gelungen ist Ihn davon abzuhalten. Im Beitrag TronXY X5S Mechanik hatte ich bereits eine große Zahl an Mängeln aufgezählt und ordentlich Kritik von DonKracho einstecken müssen. Seine Lobeshymne im Kommentar stellte sich für mich als Vervollständigung der Mängelliste heraus. Tronxy hat dazu gelernt und eine überarbeitete Version des X5S herausgebracht. Da ich die ältere Version erhalten habe kann ich nichts dazu sagen. Zum Glück hat Peter die neuere Version und ich konnte einige Änderungen übernehmen. Mein X5S befindet sich also jetzt auf einem ähnlichen Stand wie der aktuell ausgelieferte X5S. Einige Punkte sind anders und lassen sich nicht einfach anpassen. Daher freut es mich, daß ich mit Peter den ersten gemeinsamen Beitrag schreibe und er zum Vergleich die neuere Version und Seine Änderungen präsentiert.
 |
Ich werde die Mängel nicht nochmals einzeln durchgehen! Lest den alten Beitrag und DonKrachos Kommentar. Für alle die meine Anpassungen und Änderungen nachbauen möchten hier die Stl-Dateien. Ich empfehle noch immer die Senkkopfschrauben mit Innensechskant. Es ist nicht ganz einfach die Löcher in den Profilen zu senken aber danach sitzen die Schraubenköpfe ordentlich und sind in der Nut nicht im Weg. Außerdem lassen sie sich besser als Kreuzschlitzschrauben festziehen | |
 |
||
| Trotz Aussage von DonKracho empfehle ich den Einsatz einiger Winkel zum Aussteifen des Rahmens. Ist für mich nicht begreiflich warum am X5 vorhanden und hier nicht. Unten hab ich 4 selber gedruckte Winkel verwendet die zum Ausrichten mit Gerätefüßen oder wie bei mir Sechskantschrauben mit Rändelknopf dienen. |  |
|
 |
 |
|
| Zusätzlich hab ich noch 4 verdeckte Winkel verbaut. Die Zahnriemenführung an den Y-Schlitten hab ich nach aktuellem Vorbild verändert und auch den X-Schlitten zur Befestigung der Zahnriemen entsprechend umgebaut. Die geliebten Zipties zur Befestigung der Zahnriemen hab ich ersetzt. Die Umlenkungen auf der Zahnseite haben Zahnrollen über die Kugellager erhalten. Beim Spannen der Zahnriemen hat es dann knack gemacht. |   |
|
 |
 |
|
| Die Originalteile gibt es auf GrabCAD im dwg-Format. Der Acrylhalter vom Y-Stepper ist einfach entlang der Bohrungen und dem Buchstaben gebrochen. Eine verstärkte Halterung von mir in der zip-Datei. | ||
 |
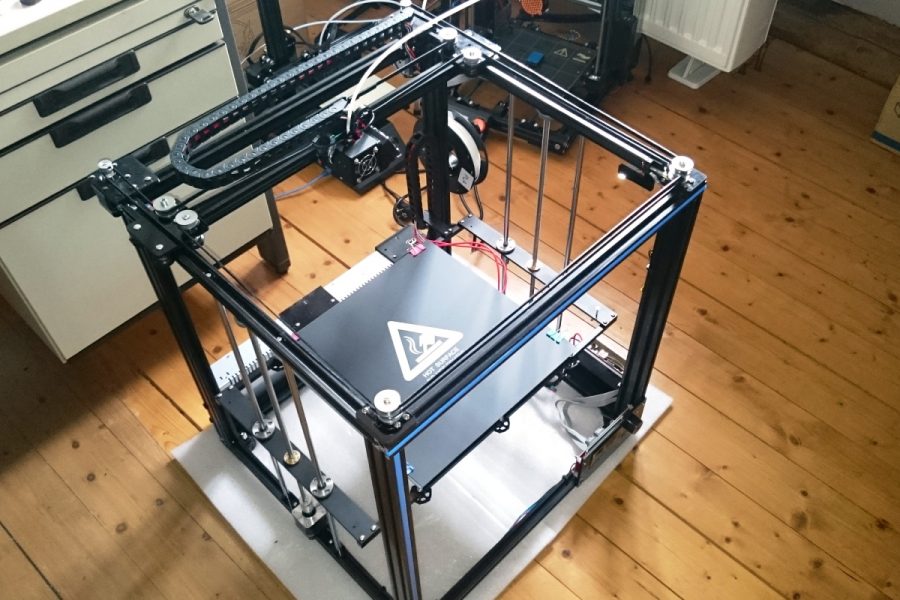
Ein Mosfet-Gehäuse erstellt und verbaut und da kommt ein Punkt den ich im letzten Bericht noch nicht auf dem Bildschirm hatte. Das Druckbett. Wer die neue Variante besitzt darf sich freuen. Tronxy verbaut ein Druckbett in 12/24V. Mit dem 12V Netzteil wird nur ein Teil der Heizleistung verwendet um das 360W-Netzteil nicht zu überlasten. Mit 180W liegt das zumindest auf Augenhöhe mit dem CR-10 und läßt sich nutzen. In meinem Drucker befindet sich ein reines 24V Druckbett das mit 12V betrieben gerade 100W erreicht. Mehr als PLA ist damit nicht möglich. | |
  |
 |
|
| Eine 12V-USB-Steckdose klemmt jetzt am völlig überdimensionierten 12V-Netzteil. Austauschen werde ich es dennoch nicht. Durch Zufall habe ich ein äußerlich identisches 24V-Netzteil gekauft welches mit dem vorhandenen Netzteil einen perfekten Abschluß auf der Rückseite bildet. Halterungen für Steckdose und Netzteil findet Ihr in der Zip-Datei. Ein paar Kabelschellen findet Ihr auch dort. So richtig zufrieden mit dem Kabelsalat bin ich noch nicht aber ich bin halt kein Elektriker. Zumindest heizt das Heizbett mit 24V deutlich schneller als an meinem CR-10. | ||
 |
Den Bauteillüfter hab ich auch etwas modifiziert aber Peter ist dabei eine Prusa-Düse zu verbauen. Eins gibt es noch zu den Lüftern zu sagen. Gut möglich, daß ich bereits einen Gehörschaden von den anderen China-Druckern habe und es darum kaum noch höre aber das ist der erste Drucker bei mir dessen Lüfter wirklich leise sind. Jetzt werde ich den Drucker zunächst ausgiebig testen und mir überlegen, wie ich den noch etwas optimieren und verkleiden kann. Als erstes eine ordentliche Auflage für das Druckbett. Bei 330×330 nicht ganz einfach. | |
| Die beiden Energieketten kommen sich ein wenig ins Gehege. Die Kette für das Hottend sollte möglicher Weise etwas mittig gesetzt und gekürzt werden. |  |
|
 |
Vielleicht wird Stephan nach dem Bericht auch neidisch und baut seine Bastelbude auch noch zusammen und wir können gemeinsam über weitere Optimierungen und Umbauten nachdenken. Die Displayanordnung ist auch sehr ungünstig. Also drucken wir was. Oben währe noch besser aber dafür sind die Hosenträger zu kurz. | |
| So! Nun hab ich den Testwürfel gedruckt und eine Abweichung von 1mm in der X-Achse festgestellt. Durch die Umbauten und die steifen Zahnriemen bei fehlendem Riemenspanner wandert der Riemen immer von einer zur anderen Seite bis wieder ausreichender Zug den X-Schlitten bewegt. mit einem ersten Versuch eines Riemenspanners in der Mitte der beiden vorderen Umlenkungen hab ich die Abweichung bereits auf 0,5mm reduziert. Die Tendenz stimmt also, das Ergebnis noch nicht. | ||
Peters „X5.1S“Mein Tronxy X5S wurde Anfang März 2018 geliefert, und die PDF-Anleitung auf der SD-Card ist mit „V0.2“ benannt. Es ist schon eine überarbeitete Version. Ich begreife ihn als Basis, um ihn unter „baubegleitender Planung“ nach und nach umzubauen. Hier also ein Zwischenstand. Es ist ein Funktions- und kein Modding-Projekt, d.h. die Optik wird immer eher einem fliegenden Laboraufbau ähneln.
|
||
| Die von Tronxy vorgesehene Verschraubung ist nicht total katastrophal. Da ich den Drucker aber auch hin- und herstellen muss, und er einmal richtig gut funktionieren soll, hatte ich mir rechtzeitig Eckwinkel bestellt und von Beginn an zusätzlich überall dort verbaut, wo sie nicht im Weg sind. So kann man 18 dieser Winkel verschrauben, wenn man alles andere wie von Tronxy vorgesehen verbauen möchte. |  |
|
  |
Der Riemenantrieb war ab Werk auch in der überarbeiteten Version unverändert mit Kugellagern und festen Unterlegscheiben realisiert. Nur die Umlenkung auf den Y-Schlitten war schon so getrennt, dass die Riemen parallel laufen. Ich habe dieses Werkssetup kurz probiert und dann auf Standard-Umlenkrollen mit 5mm Kugellagern umgebaut, sechs gezahnte, zwei glatte. Um das Einklemmen der Rollen in der Verschraubung zu verhindern, kommen flache M5 Muttern gekontert zum Einsatz. Auf den vorderen Ecken habe ich die Umlenkpunkte getrennt, damit die Riemen besser parallel laufen. Beim Aussenriemen geht das nicht ganz, damit der Schraubenkopf noch in die Rahmenecke passt. Auf der Vorderseite kreuzen sich die Riemen. Den zu unflexiblen Werks-Riemen mit Stahlseele habe ich durch einen Standard-GFK-Riemen ersetzt. Insgesamt läuft das so sehr gut und kann so bleiben. | |
| Um die Kabel transportfähig zu bekommen, ist eine 9mm Siebdruckplatte untergeschraubt. Die Elektronik verwende ich im Moment noch im Original. Das Brainboard hat einen leisen Lüfter spendiert bekommen und das Heatbed ein Mosfet. Dazu für Brainboard und Heatbed-Kreis je eine KFZ-Sicherung. |  |
|
 |
Der Netzteillüfter wird lastabhängig geregelt. Ich habe ihn wie beim Ender schon durch einen leisen getauscht. Zusätzlich ist eine der Acrylplatten durch einen Druck ersetzt, um für mehr Zuluft zu sorgen. Das hat nicht viel gebracht. Wirklich leise bekommt man das Netzteil wohl nur, indem man das Blech aus der Ausblasöffnung schneidet. Da ich die Heatbed Last im nächsten Schritt vom Netzteil nehmen werde, warte ich hier jetzt aber erstmal ab. | |
| Das hier schon mit getauschter Silikonsocke abgebildete Werks-Hotend war zwar eine ganz einfache Version, hat aber im Zusammenspiel mit der Parametrierung der Software sehr gut funktioniert. Leider habe ich es kaputtgespielt und jetzt ist ein deutlich aufwändigeres CR10-Hotend eingebaut, was in diesem Setup im Moment noch etwas schlechter druckt, als das Werks-Hotend. |  |
|
 |
Die Bauteilekühlung in der überarbeiteten Version arbeitet mit einem kleinen Radiallüfter. Das funktioniert ganz ordentlich. | |
| Bei den Experimenten mit dem Ender stand aber immer noch der Test mit der Düse des Prusa MK3 aus. Das habe ich hier jetzt realisiert und die Düse wie im Original mit einem großen Blower kombiniert. Der Hotend-Lüfter ist auch durch einen leiseren getauscht. Für den einfachen Tausch der Komponenten kommt eine Lüsterklemmenleiste zum Einsatz. Das ist so ganz frisch und zur Bewertung muss erst gedruckt werden.
Langfristig möchte ich in dieser Anordnung auch ein E3D V6 mit und ohne Volcano probieren. |
 |
|
 |
Meine nächsten Pläne:
– Drucken. – Die Strippensammlung zum Hotend zähmen und insbesondere den Hotend-Strom durch ein bewegungsresistentes Kabel führen. – Das Heatbed verbessern. Uwe ist auf 24V gegangen. Ich probiere die andere Alternative mit 230V und habe dafür schon eine feingefräste Alu-Platte besorgt. |
|

Edit: Hier die STL-Files zu Peters Änderungen: 20140418 X5S Models Peter_O
Hallo,
da der Beitrag schon älter ist, hoffe ich , das man mir trotzdem Helfen kann. Seit gestern kommt bei mir die Fehlermeldung – Heizung ausgefallen E1 SYSTEM HALT- Heating Failed E1 System halt –
Was soll ich machen??
Freue mich über jede Antwort
In den Kommentaren liest kaum einer mit. Stell die Frage besser im Forum.
Moin, der Beitrag hier ist zwar schon etwas älter, aber ich hoffe dass mein Kommentar hier trotzdem noch gelesen wird.
Im Beitrag wird geschrieben, dass ein 24V Heizbett verbaut war, welches dann nur mit 12V betrieben wurde.
Ich besitze auch den Tronxy X5S und frage mich, wie ich feststelle, welches Heizbett bei mir verbaut ist. Ich möchte meinen Drucker nämlich Upgraden und da steht auch aktuell die Frage, ob ich auf 24V aufrüste im Raum. Wenn ich schon ein 24V Heizbett besitze würde das mir bei meiner Entscheidung helfen.
Die Steckverbinder vom Heizbett lösen und den Widerstand (mit Multimeter) zwei Polen messen. Vielleicht ist auch eine Tabelle vorhanden, die anzeigt, wie der Stromkreis auf 12V oder 24V angeschlossen wird.
Durch den Widerstand und die Spannung (=V) ergibt sich die Last (Ampere = A), die benötigt wird, um das Heizbett zubetreiben, d. h. bei geringerem Widerstand benötigst Du für die identische Leistung ( A * V = W = Watt) eine höhere Last (A). Alles weitere dazu steht im Ohmschen Gesetz. Folgende Werte sind typisch.
Resistance between 1 and 1.3 ohm for the 12V
Resistance between 4.5 and 5 ohm for the 24V
Eine Tabelle ist leider nicht vorhanden. An meinem Heizbett gibt es auch nur 2 Pole, nicht wie bei anderen(/neueren) 3 oder 4 Pole.
Den Widerstand habe ich schon gemessen. Der liegt bei ca. 1,4 Ohm, gelegentlich 1,8 Ohm. Das würde dann ja für ein 12V Heizbett sprechen.
Ich bekomme mein Heizbett allerdings nicht weiter als 50°C aufgeheizt und im Shop bei roboter-bausatz habe ich ein sehr ähnliches(identisches) Heizbett gefunden, dass die gleichen Werte aufzeigt (12V mit 110W -> 1,4Ohm; 24V mit 410W -> 1,4 Ohm). Das lässt mich vermuten (hoffen), dass bei mir auch ein solches verbaut ist.
Ja klar lesen wir die Kommentare.
Zunächst mal hilft nur messen und nachsehen. Wenn da nur ein Typ verbaut wäre wär es doch zu einfach! Es gibt das 24V Bett ohne Tabelle und ohne jede Möglichkeit auf 12V zu verändern wie bei mir. Das hat ca. 1,4 Ohm. Für 12V klingt das bei der Größe mit etwa 100W einfach unsinnig und Du wirst selber feststellen, das Ding wird nicht richtig warm. Es gibt auch welche mit der Möglichkeit über Lötbrücken von 12 auf 24 V zu ändern. Da ist oft nur ein Kreis von 2 angeschlossen um das 360W Netzteil nicht zu überlasten. In Reihe geschaltet kann es aber auch mit 24V betrieben werden.
Für mich klingt das so, dass ich das gleiche Heizbett besitze wie du und es dementsprechend ein 24V Heizbett ist.
Ich habe ebenfalls 1,4 Ohm gemessen und wie gesagt bekomme ich es nicht wärmer als 50°C (bei entsprechender Umgebungstemperatur auch mal in die Nähe von 60°C). Auch steht bei mir keine Tabelle auf der Rückseite des Heizbettes und Lotbrücken lassen sich nicht bilden, da nur zwei Pins verfügbar sind.
Du kannst an Deinem Heizbett auch ein 24V Netzteil anschließen. Das Heizbett zieht immer soviel Strom, wie sich anhand des Ohmschen Gesetzes ergibt und wandelt dies dann in Wärme um. I = U / R
Der Widerstand dürfte eigentlich nicht variieren. Vielleicht lagen die Prüfspitzen nicht korrekt an. Bei 1,4 Ohm ergibt sich demnach eine Stärke (A) von A = 12 / 1,4 = 8,5. Daraus ergibt sich dann eine Last (W) von W = V * A = 102W. Wenn ich nun ein 24V Netzteil anschließe, benötige ich 420 Watt. Wird der Widerstand höher, sinkt die Last die ich brauche und die Stromkosten können reduziert werden.
Wenn Du ein neues Netzteil verwendest, muss Deine alter Hardware entweder auch auf dieser Spannung laufen, da diese gepulst durchgeschliffen wird oder einen Mosfet zwischensetzen, der dann die 24V entsprechend zerstückelt, so das die Temperatur auf dem entsprechenden Wert hält.
Das muss man sich so vorstellen. Dein Netzteil liefert 12V. Am Heizbett kommen aber nur 80% von 12V an, da die Spannung zerstückelt wird und erreicht damit die Temperatur, die anliegen würde, wenn Du 9,6V anlegen würdest. Damit kann die Temperatur stabil gehalten werden.
Je höher die Spannung und Widerstand ist, desto weniger Strom wird zum erreichen und halten der Temperatur aufgewendet. Je höher der Widerstand ist, und geringer die Spannung ist, desto geringer ist die Last, die ich aufrufen kann. Stelle Dir vor, für dein Heizbett werden 200 Watt benötigt um die Temperatur von 80°C zu erreichen. Daran kannst Du dann festmachen, ob Du diesen Wert mit 12V bei 1,4 Ohm erreichen kannst. Wenn nicht, dann wirst Du die 80°C nicht erreichen. man sollte seine Komponenten auch nicht an der Leistungsgrenze betreiben.
Ich habe aktuell leider kein 24V Netzteil oder ein Labornetzteil hier, um das zu testen.
Die ganzen Berechnungen habe ich auch schon durchgeführt und finde wie Uwe, dass 102W bei der Heizbettgröße einfach unsinnig sind. Ferner habe ich auch im Betrieb mal die Spannung am Controlboard zum Heizbett gemessen, da konnte ich dann knapp über 11V am Multimeter ablesen.
Ich hatte geplant ein neues Board zu verwenden (MKS SGen_l V1) das kann sowohl mit 12V als auch 24V arbeiten, sodass ich hier keine Probleme bekomme. Einen MosFET wollte ich dann so oder so zwischen Board und Heizbett allein wegen der Sicherheit und Entlastung des Controlboards zwischen schalten.
Da ich bei 12V und 1,4 Ohm ja nur maximal 102W erreichen kann, kann die Temperatur von 80°C (wofür als Beispiel 200W benötigt werden). Wenn das Heizbett ja aber für 24V ausgelegt ist, kann es maximal 420W verbrauchen, was doppelt so viel ist wie benötigt und somit fern der Leistungsgrenze.
Wenn das Board mit 12 und 24V kann arbeitet es dann aber noch immer nur mit 12 oder 24V. Du kannst alles auf 24V umstellen und auch das Hotend und die Lüfter auf 24V tauschen oder alles belassen und mit einem MosFet nur das Heizbett mit 24V betreiben. Für Version 1 brauchst Du dann schon ein Netzteil mit über 500W um da nicht ständig im Grenzbereich des Netzteils zu landen. Für das Heizbett allein hab ich schon ein 480W Netzteil. Den Strom für das 420W Heizbett würde ich in keinem Fall direkt über das Board laufen lassen. Irgendwann fängt das an zu leuchten!
Ich tendiere zur 2. Version, sprich ich betreibe nur das Heizbett mit den 24V über den MosFET und den Rest mit der schon vorhandenen 12V PSU. Oder wie viel Sinn macht es den Rest auch mit 24V zu betreiben, speziell welche Vorteile ziehe ich bei den Motoren daraus?
Die etwas offene Frage ist, ob ich das gleiche Heizbett wie du (Uwe) besitze, dass mit 24V arbeiten kann. Für mich klingt es stark danach.
Die letzte Gewissheit kann ich Dir auch nicht bieten. Ich stehe nicht vor dem Drucker. Für mich war es simpler mit 2 Netzteilen zu arbeiten. Da die meisten Boards problemlos mit den 12V klar kommen sollte das auch keine Einschränkung sein. Die zusätzliche Leistung vom Netzteil verwende ich gleich mit für den Raspi und die Beleuchtung. Da ist reichlich Spielraum. Da es nicht an die Leistungsgrenze kommt springt der Lüfter nicht mehr an. Beim 24V-Netzteil hör ich wenn das Heizbett anspringt.
Hallo @Uwe R., um die Zahnriemenscheiben von Dir auf die 529.ZZ aufzuziehen, müssen die alten runter. Hast Du dafür einen Abzieher verwendet? Ich kriege die mit meinen Händen definitiv nicht ausgedrückt. Hast Du vielleicht noch einen anderen Ratschlag?
Diese 529.ZZ finde ich nicht zu kaufen. 5mm Bohrloch, 10,, Höhe, 16 mm Durchmesser.
Da kann ich grad nur mit den Axeln zucken. Bei uns war nichts auf den Lagern.
Ich habe im Forum dazu ein Thema eröffnet. Kannst Du mir den Durchmesser eurer Unterlegscheiben nennen? Wahrscheinlich M5x25mm?
Hallo, bei Roboter-Bausatz finde ich nur Riemenscheiben mit 20 Zähnen, anstatt der 32 Zähnen. Kann man diese ebenfalls verwenden? Er dreht bei 20 Zähnen schneller, aber welchen Unterschied machen die 12 Zähne, weshalb man nun 32 statt 20 nehmen würde?
Wäre das so korrekt?
6x Riemenscheibe GT2, 20Z: https://www.roboter-bausatz.de/2630/gt2-riemenscheibe-20-zaehne-5mm-bohrung-mit-dual-kugellager
2x Flachriemenscheibe GT2: https://www.roboter-bausatz.de/1224/gt2-zahnriemen-flachriemenscheibe-5mm
2x Zahnriemen GT2, 1 m: https://www.roboter-bausatz.de/212/1-meter-gt2-zahnriemen-offen-6mm
2x Zahnrad Z20: https://www.roboter-bausatz.de/328/gt2-riemenscheibe-20-zaehne-5mm-bohrung-fuer-6mm-riemen
Für Umlenkrollen spielt es keine Rolle wie viele Zähne. Ich hab die Kugellager wieder verwendet und die Riemenscheiben gedruckt. Bei 20 Zähnen hätten die Lager nicht gepaßt. Dem Zahnriemen ist es aber schon angenehm wenn er weniger stark geknickt wird.
Hallo Uwe, vielen Dank für die Nachricht!
Mit Lager ist der Nema17 gemeint, auf dem die Riemenscheibe sitzt oder sind damit alle Umlenkrollen gemeint? Wenn ich Deinen Aufbau verwenden möchte, muss ich Umlenkrollen mit min. 32 Zähnen verwenden oder reicht es, wenn man die Riemenscheibe auf dem Nema17 auf 30 Zähne erhöht und die anderen Umlenkrollen bei 20 Zähnen belässt?
Geht es primär um den Biegeradius am Motor oder den Umlenkrollen? Am Motor wirkt ja der größe Radius.
Oder wäre ein Zahnriemen, der einen höhere Biegeradius hat bei 20 zahnigen Umlenkrollen eine Alternative?
Ich hab die Umlenkrollen gemeint. Da auch nur die auf der Seite der Zähne. Die Zahnriemenscheiben auf den Steppern(Nema 17) haben wir nicht verändert. Die müssen genau die Zähnezahl behalten die sie haben. Sonst verändert sich einfach alles und die haben auch keine Kugellager.
Hallo Uwe, Danke für die Aufklärung. Ich suche schon seit Stunden nach Umlenkrollen mit 32 Zähnen. Ich finde nur Riemenscheiben (die auf dem Nema17) mit 32 Zähnen; Wobei die Varianten mit 32 Zähnen unverhältnismäßig teurer als die anderen mit 20, 30 oder 36 Zähnen sind. Weißt Du, wo ich Umlenkrollen mit 32 Zähnen bekomme? Bei ebay, Amazon, Banggood und Alibaba kann ich keine finden…
Die Umlenkrollen mit 20 Zähnen können aufgrund des Biegeradius nicht verwendet werden?
Bitte lies es wie ich es schreibe. Für die Umlenkrolle spielt die Zähnezahl keine Rolle aber der Zahnriemen freut sich über einen großen Radius. Ich hab nach sehr viel Suchen auf Ali zwar was gefunden aber war mir zu doof. Ich hab mir passende Zahnriemenscheiben gedruckt. Die passen auf die Kugellager welche als „Umlenkrollen“ verbaut sind.
Hallo Uwe, nun verstehe ich es! Du hast die Stock Umlenkrollen verwendet und dort die Zahnriemenscheibe aufgezogen. Bei den Modellen im Anhang sind diese aber nicht dabei? Ich konnte diese jedenfalls nicht finden. Könntest Du diese freundlicherweise zur Verfügung stellen?
Hallo Johannes, ich hab die Original-Pulleys an den Motoren gelassen und dann 20er Umlenkrollen mit Kugellagern mit 5mm-Bohrung verwendet. Das ist oben auch beschrieben. Das läuft mit einem Standard-GT2-Riemen aus China mit Glasfaserseele jetzt schon ein Jahr ohne Probleme. Die Umlenkrollen dieser Größe sind ja quasi der Standard in allen Druckern und haben sich offenbar großflächig bewährt. Fotos sind auch oben im Blogbeitrag.
Liegt als stl in der verlinkten zip-Datei im 2. Absatz. Darunter ein Bild mit den enthaltenen Teilen. Das sind eigentlich 2 Berichte. Der Untere ist von Peter. Hier nochmal…
Moin, hat schon jemand von euch den Tronxy mit Octopi verbunden?Bei mir bekommt der keine Verbindung zu dem drucker,vielleicht hat ja einer von euch eine Lösung
Ja. Da hängt ein Zero am X5S. Wo ist das Problem?
–
Hallo zuammen,
ich will mir demnächst auch dieses Model bestellen.
Könnt ihr mir mitteilen, welche Nut die Aluprofile haben?(Nut 5 oder Nut 6)
Vielen Dank schon mal.
mfg. Blei
Gott sei Dank! und ich dachte schon, hier wird nur noch über Chinashops diskutiert. Es handelt sich um echte V-Nut Profile also mit 6mm Nut.
Hallo Uwe,
könntest du das „Pulley 32 GT2“ des X5S auch noch wie für den Ender-3 anpassen?
Wie ich sehen kann, hat das auch noch kein richtiges GT2 Profil, ist das schlimm?
Mein Tronxy ist leider noch nicht weiter im Aufbau gekommen, die schwer laufenden X und Y Achsen machen mich nachdenklich. Wollte das mal mit dem Ender-4 vergleichen, aber der liegt noch OVP unterm Tisch.
Du hast an deinem die org. Kugellager mit und ohne deinem Zahnkranz. Macht das kein Problem vom unterschiedlichen Durchmesser? Evtl. noch ein Zahnkranz ohne Zähne damit der Durchmesser gleich ist?
Gruß Michael
Ich komme zur Zeit mit dem X5S nicht weiter. Ich warte wie verrückt auf Druckerteile aus China. Der Durchmesser der Umlenkrollen hat keinen Einfluß. Wenn Du was siehst was ich nicht sehe währ es sehr nett wenn Du mir das mitteilst. Das Profil der Zahnriemenscheiben hab ich nach bestem Wissen und Gewissen… Es funktioniert bei mir recht gut. Auf der glatten Seite des Riemens ist natürlich keine Zahnriemenscheibe. Ansonsten ist nur anzumerken, daß der Riemen sehr steif ist und ich werde den austauschen sobald die Teile hier eintreffen. Wenn Du den Riemen beibehalten möchtest würde ich die Zahnriemenscheiben auch an den Antrieben größer machen. Der Riemen hat einfach Probleme mit den kleinen Radien. Da der Druck bei den Scheiben für den Ender-3 bei Dir bereits Probleme bereitet hat und das 16.2er Modell wohl paßt würde ich für Dich den Zahnraum wieder um 0,1mm und die Bohrung um 0,2mm erweitern? Paßt denn der Außendurchmesser? Den hab ich nämlich nicht geändert. um die Teilung von 2mm nicht zu ändern.
Ich denke der Aussendurchmesser passt, da der Riemen sauber läuft. Aber ich messe es Morgen mal nach deiner Zeichnung nach.
Bei meinen selbst gezeichneten Teilen sind die Aussenmaße immer korrekt aber die Innenmaße 0,2 zu klein. Darum zeichne ich Innenmaße immer 0,2 größer dann passt es.
Oder wo muss ich am Drucker drehen damit es passt? Oder am Slicer?
Hab es in das Forum verschoben. Anhang…
Hat irgend wer mal die Riemenführung des Ender-4 am X5S ausprobiert?
Inzwischen habe ich die Flanschlager mit den schwarzen Kunstoffgehäusen durch solche mit Metallgehäusen ersetzt. Das ist jetzt erheblich stabiler, und ich hoffe, dass das Leveling zukünftig auch stabiler bleibt.
Die 230V-Heizmatte ist heute auch angekommen. Fehlt nur noch das SSR für den nächsten Schritt.
Hast Du es gut! Die grad erst bestellte magnetische Flex-Druckplatte ist auf den Weg aber von den vor über 2Wochen bestellten Teilen keine Spur. Hoffentlich lohnt sich das Warten! Bis dahin mach ich es wie Du und spiele mit dem Ender. Kann ja mal nach Zahnriemenrollen mit 8er Bohrung suchen.
Ich hab die Flanschlager reklamiert, aber bis da was kommt von Gearbest …… bringt es etwas wenn man die Wellen auch gleich weiter auseinander setzt?
So. Wunschgemäß habe ich oben im Blog ganz unten einen Link auf die STL-Files meiner Änderungen ergänzt.
Wie ist nun eigentlich die „Prusa“ Bauteillüftung?
Was geht denn hier ab!
Immer schön einer nach dem Anderen! Peter und ich waren grad am diskutieren. Ich hab die Plastelager nicht und kann da nichts dazu sagen aber mein Ansatz war igus.
Der Rahmen unter dem Druckbett verdient den Namen nicht. Schon paar einfache Aluwinkel bringen deutlich mehr Steifigkeit.
Ich überlege, ob die Rundeisen nicht gegen V-Nut-Profile getauscht werden und die Z-Achsen nicht auch besser auf Rollen laufen.
Die Pulleys mit 32 Zähnen hab ich für die Kugellager erstellt. Ich wollte nicht die kleinen Zahnräder mit 20 Zähnen für den steifen Zahnriemen.
Das 24V-Netzteil hab ich einfach an das 12V-Netzteil parallel angeschlossen und die Sicherung in dem Anschluß getauscht. Das Kabel am Aluprofil entlang geführt. 360W sind etwas zu wenig. Das Bett alleine bringt es auf knapp über 400W. Ich habe dieses (https://www.amazon.de/gp/product/B01JLY75G2/ref=oh_aui_detailpage_o00_s00?ie=UTF8&psc=1) mit 480W gekauft. Das ist mechanisch baugleich zum 12V-Netzteil. Das Bett heizt in 2min auf 60°C. Die Teile von Peter muß Peter selber zur Verfügung stellen. Die Montageteile vom Netzteil befinden sich in der zip-Datei. Zum Vereinzeln muß ich die Teile erst wieder raussuchen.
So! Auf mehrfachen Wunsch eines einzelnen Herren der Netzteilhalter vereinzelt und ein Spanner dazu.
@Uwe
könntest du die Teile der PSU Holder vereinzeln? Und evtl. die Teile von Peter hinzufügen?
Wie/Wo hast du die 230V Leitungen verlegt?
@Peter
welche Riemen hast du verbaut?
Einen von Roboter-Bausatz, also ein standard GT2 mit Glasfaser für dünnes Geld.
@Uwe
sind die „Pulley 32 Tooth“ für die Original Kugellager 625?
@Peter
sind deine Plastik Lagerhalter für Z noch ganz? Meine sind auseinander gebrochen ohne das er einen 1mm gedruckt hat, nur vom rumstehen.
Habe Heute mal ein paar Tests mit Mosfets und 24V am neuen Druckbett gemacht …. krass wie schnell das auf 60Grad ist bei 24@17A (zwei 12V-360Watt Netzteile in Reihe)
Bin am überlegen evtl. doch lieber ein eigenes 24V-360Watt Netzteil für das Heizbett und dann den PID-Max reduzieren damit das Netzteil keine macken macht. Wobei das 12V 360Watt beim Test des Heizbettes bei richtiger 12V beschaltet keine Probleme verursachten …. nur die Leitung hatten schnell 60Grad 🙂 …. min. 2,5mm² ist hier Plicht.
Du meinst die Flanschlager aus schwarzem Weichplastik? Ja, noch sind die heil, aber die müssen auf jeden Fall weg. Das ist der weichste Teil des Druckbetts. Du kriegst die Dinger auch aus Metall. Ich selbst werde stärker umbauen, weil meine Druckbühne wahrscheinlich bei etwas 5kg Gewicht rauskommen wird, 2.5kg wiegt alleine die Alu-Platte. Da ist der Rest des kleinen Rahmens auch zu zierlich.
Ja die meinte ich. Beim auspacken waren die auch noch „weich“ und rochen perverse. Nun sind sie nach 4 Wochen rumstehen hart und spröde 🙁
Die Druckbetthalterung ist mir auch noch zu labil. Denke da auch an Aluprofil und 12er Wellen oder mit V-Räder auf den Rahmen?
Als kleine Lösung möchte ich einen Rahmen aus Aluprofilen, und ordentlichen Lagern auf den bestehenden Führungsstangen.
Als große Lösung denke ich an eine Stange, zwei Rollen und drei – idealerweise kardanisch angehängte – Spindeln, die über Riemen zwangsverbunden sind.
klingt gut 🙂
Ich hab gleich mal einen zweiten Z Endschalter montiert und werde beide Motoren getrennt steuern.
Da bin ich gespannt. Berichte mal. 2 Endschalter kann Marlin wohl noch, bei 3 Spindeln und 3 Schaltern wirds dann individueller. Deshalb die 3 Spindeln dann mit Riemen und einem Motor, der sie über einen kleinen untersetzten Riemen antreibt. Ich habe mir jetz aber erstmal Metall-Lager für das bestehende Setup bei Dold bestellt um zu schauen, welche mechanische Dynamik mein fettes Heatbed so entwickelt.
Wo klemmst Du denn den zweiten Schalter an? Mein Board hat keine Anschlüsse mehr frei.
Ich werden ihn gleich mit einem MKS Gen V1.4 + TMCs bestücken. Oder ein Arduino DUE mit modifiziertem Ramps 1.5 incl. TMCs (32Bit) … ob man einen Unterschied merkt.
Aber nun steht der CR-10 wieder auf der Werkbank und wird hoffentlich fertig.