
Steel Roller 45 – Umbau
Wie angekündigt hier der Umbau eines Ender-3 Pro mit dem Steel Roller 45 Kit von Rabotfactory zum Belt-Printer.
Wer es noch nicht gelesen hat findet hier die Einleitung dazu oder hier die Beschreibung von Robotfactory als pdf.
Umbau:
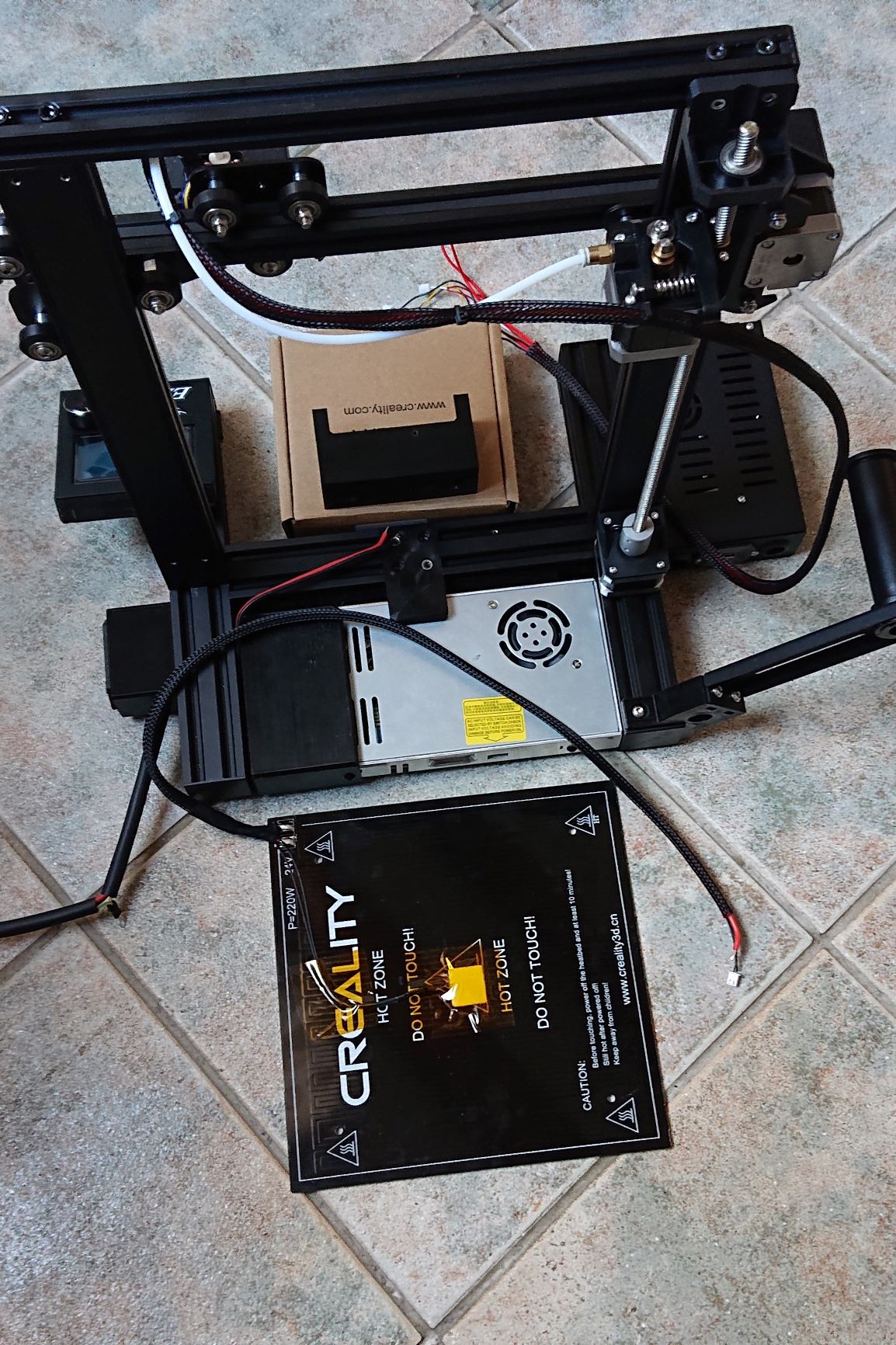
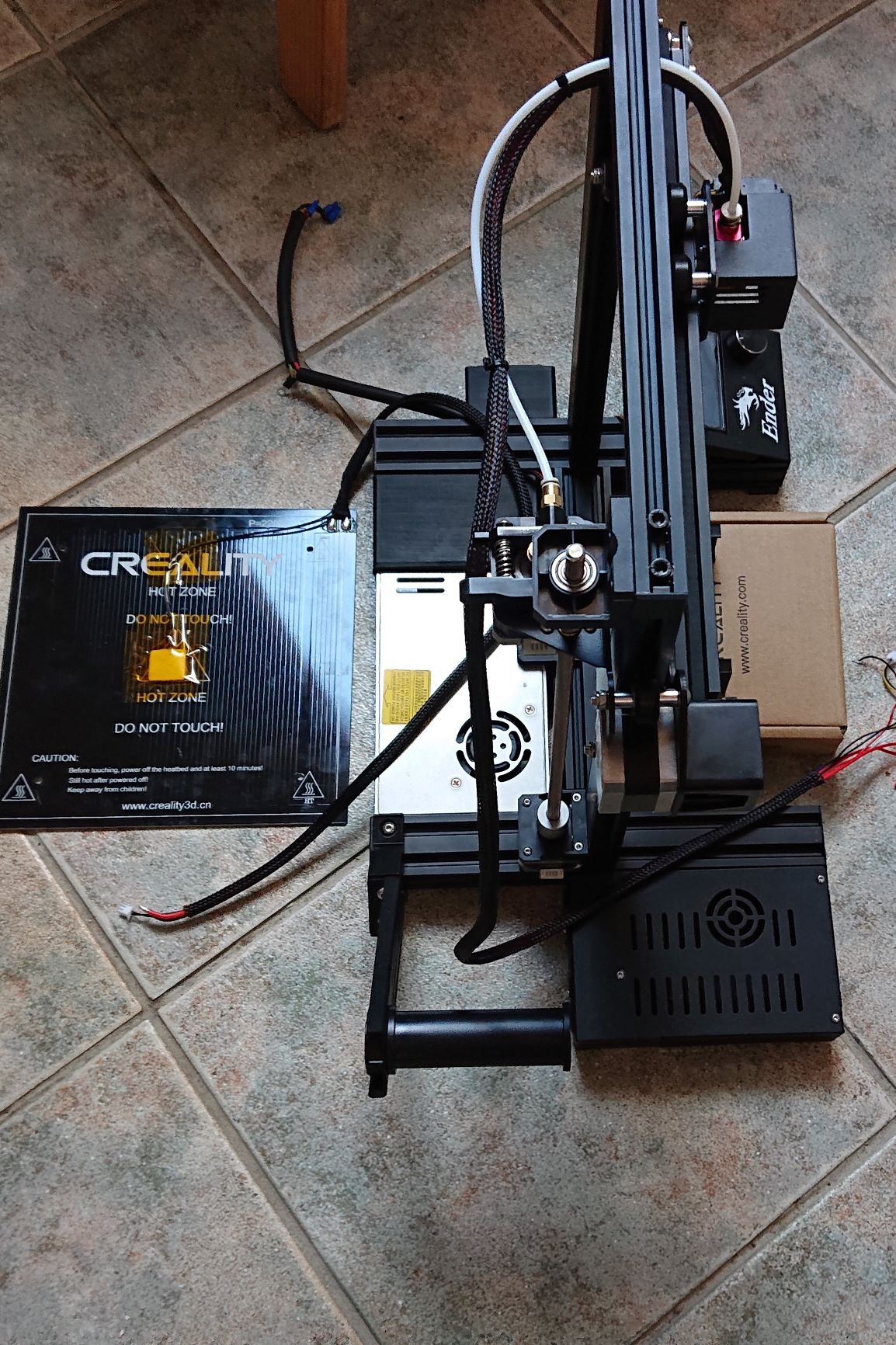
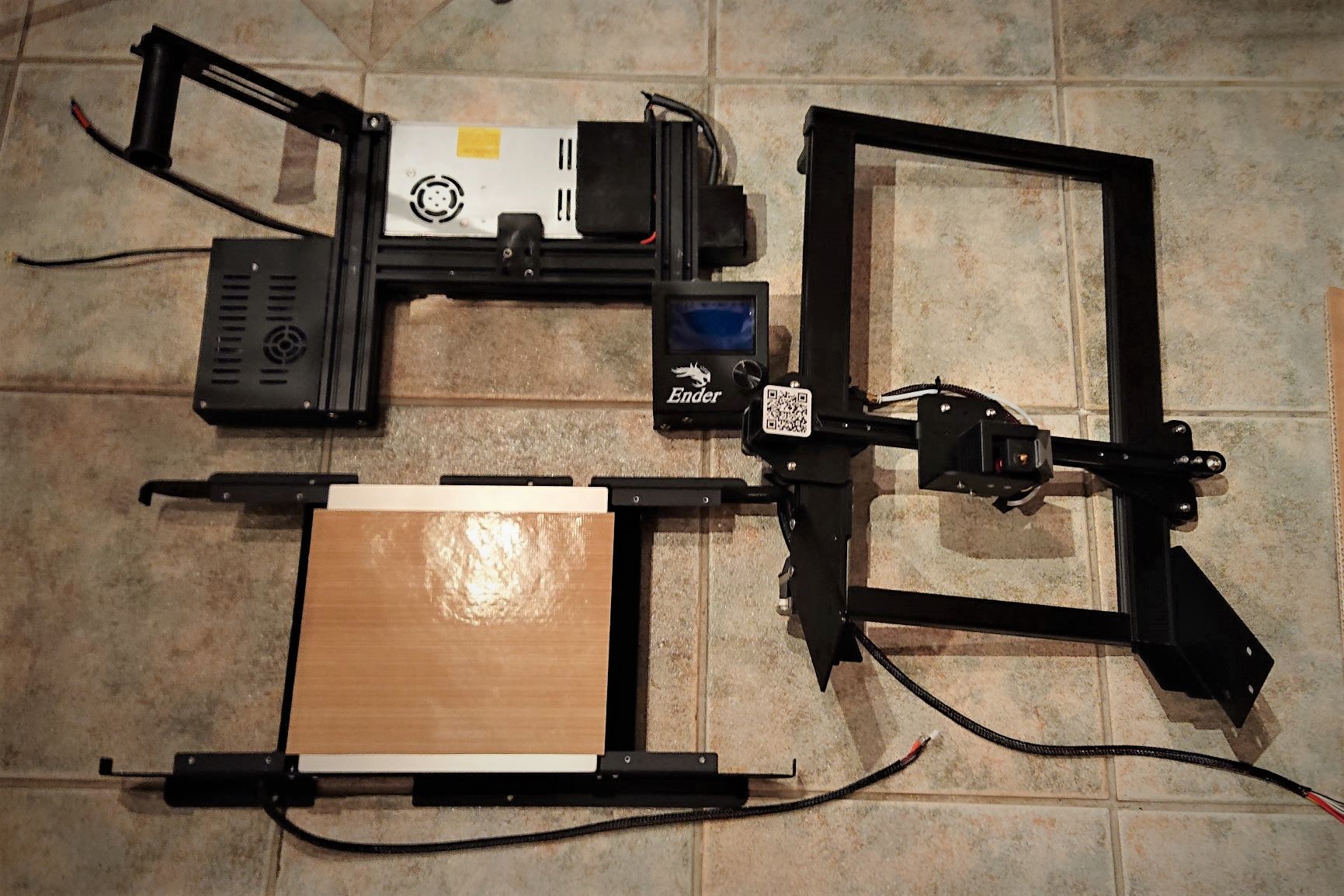
| Als Basis dient ein Ender-3 in beliebiger Ausführung. Bei der Bestellung nur das Modell angeben. Die kleinen Unterschiede werden berücksichtigt. Wer keinen zum Ausschlachten übrig hat schaut mal bei 3D-Jake. Da gibt es immer mal paar Versandrückläufer für kleines Geld. Auch der Drucker von mir kommt von dort. Nicht benötigt wird die Y-Achse und der Schlitten vom Druckbett. Der Rest wird in modifizierter Form wieder verwendet. Bohren ist dank Nutenprofil nicht erforderlich. Das Gehäuse vom Board wandert nach links. Im Kit ist ein Metallbügel enthalten um das zu halten. Da mir das offene Gehäuse nicht so gefällt hab ich mir ein Druckteil erstellt um das optisch etwas schöner zu gestalten. Als Option hab ich noch eine 5V-USB-Steckdose für den Raspi integriert. Das Netzteil wandert wie beim V2 zwischen die Profile und der Stromanschluß mit Schalter in ein eigenes kleines Kästchen auf die rechte Seite.
Uwe N hat mir noch ein 32-Bit Silent-Board zur Verfügung gestellt. Ist nicht unbedingt erforderlich aber es erleichtert das Aufspielen der Firmware. Der USB-Programmer für das 8-Bit Board entfällt damit. |

|
 |
 |




Hier schon mal die gedruckten Teile zum Download.

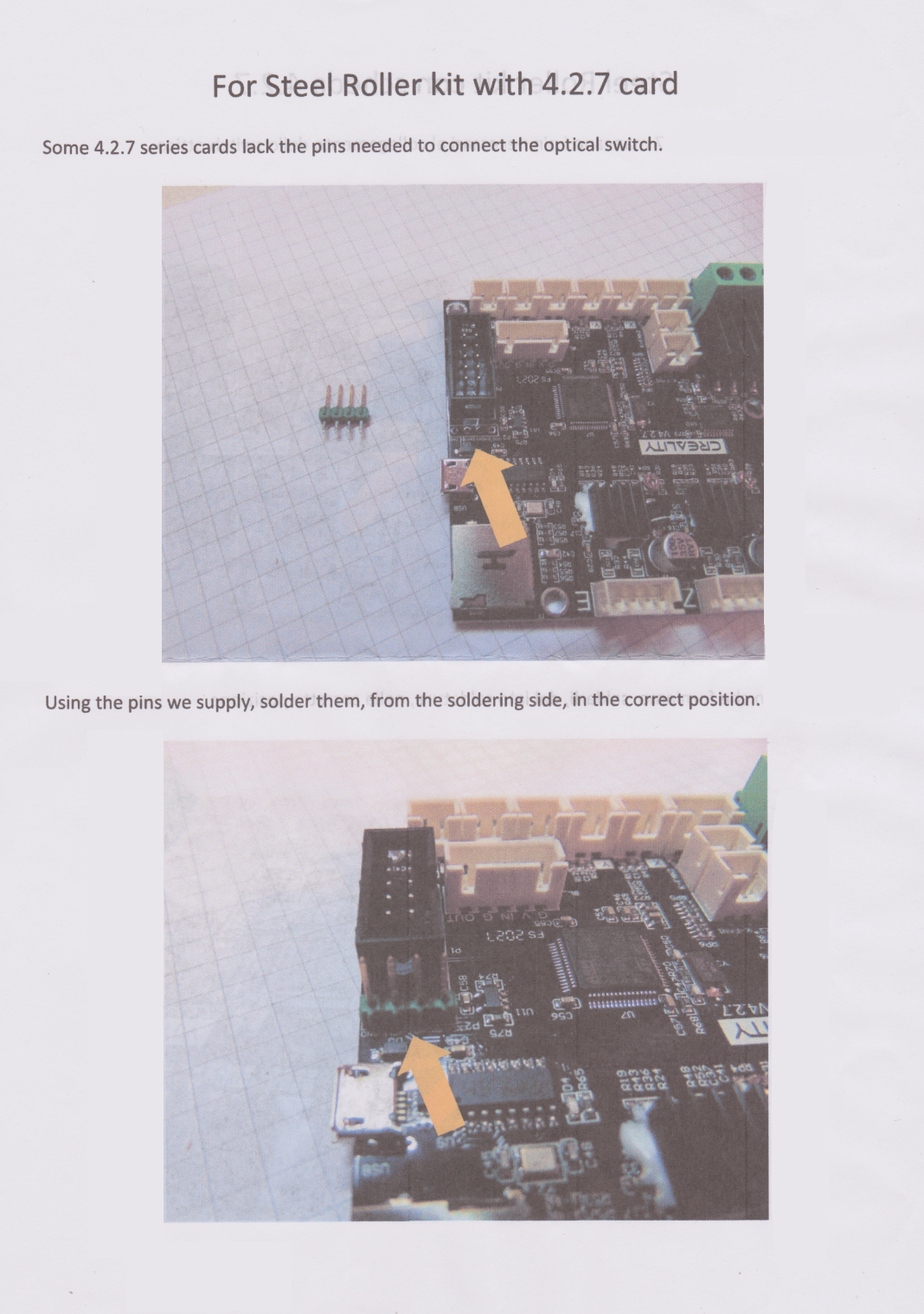
Das Kit ist angekommen. Manchmal macht es keinen Sinn sich vorher Gedanken zu machen! Da liegt ein 600mm Displaykabel bei und nun paßt das. Bei einer Tüte wurde mir gleich etwas schummrig. 4Pins sollen für einen optischen Sensor auf das Board gelötet werden. Danke Thilo für die Hilfe! Nur liegt da kein optischer Sensor bei! Das ist wohl ein optionaler Punkt und sollte auch als solcher kenntlich gemacht sein.
 Ich hab da schon auf YT einen Aufbau gesehen und man muß ja nicht alles nachmachen! Wer hält sich schon an 87 Seiten Aufbauanleitung! Also nicht falsch verstehen! Die ist top! Alles erklärt! Aber die Demontage entfällt bei mir schon. Die Teile kommen aus der Ersatzteilkiste. Netzteil und Steuerbox sind auch schon modifiziert. Der gute Mann im Video hat sich fast die Finger gebrochen bei Montage des neuen Y-Endschalters und dem Umbau des Hotends.
Ich hab da schon auf YT einen Aufbau gesehen und man muß ja nicht alles nachmachen! Wer hält sich schon an 87 Seiten Aufbauanleitung! Also nicht falsch verstehen! Die ist top! Alles erklärt! Aber die Demontage entfällt bei mir schon. Die Teile kommen aus der Ersatzteilkiste. Netzteil und Steuerbox sind auch schon modifiziert. Der gute Mann im Video hat sich fast die Finger gebrochen bei Montage des neuen Y-Endschalters und dem Umbau des Hotends.
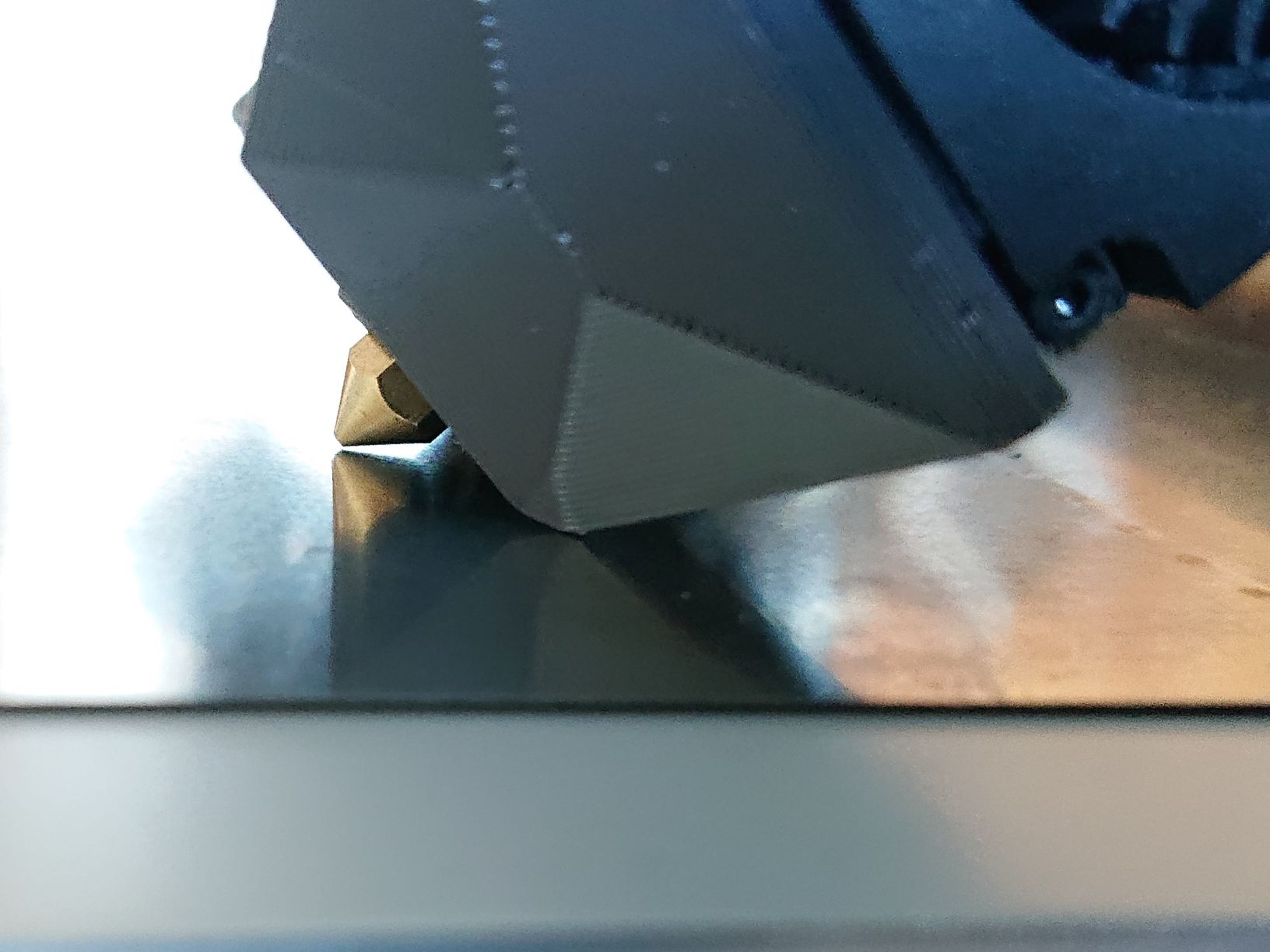
 Das macht doch keinen Sinn, erst den Drucker zu montieren und dann diese Teile da rann zu pfriemeln. Ich hab also an diesem Punkt begonnen. Die einzelnen Teile sind in beschrifteten Tüten. Also kein langes Suchen und das ging auch ohne Panzerband und Verrenkung. Dann kam da direkt das erste große Fragezeichen. Wieso sitzt diese Abdeckung vom Druckkopf 12,5mm höher als am Ender-3. Also der Heizblock schaut da plötzlich unten raus und der Bauteillüfter zielt da voll drauf. Das geht so auf keinen Fall! Es liegt auch keine geänderte Düse bei und ich hab da auch keine Antwort dazu erhalten. Besser gesagt hab ich nicht darauf gewartet und schnell eine Düse konstruiert und gedruckt. Andrea von RobotFactory hat sich zumindest bei mir dafür bedankt. Ob das schon 100% paßt sehen wir später. Im Moment sieht es gut aus.
Das macht doch keinen Sinn, erst den Drucker zu montieren und dann diese Teile da rann zu pfriemeln. Ich hab also an diesem Punkt begonnen. Die einzelnen Teile sind in beschrifteten Tüten. Also kein langes Suchen und das ging auch ohne Panzerband und Verrenkung. Dann kam da direkt das erste große Fragezeichen. Wieso sitzt diese Abdeckung vom Druckkopf 12,5mm höher als am Ender-3. Also der Heizblock schaut da plötzlich unten raus und der Bauteillüfter zielt da voll drauf. Das geht so auf keinen Fall! Es liegt auch keine geänderte Düse bei und ich hab da auch keine Antwort dazu erhalten. Besser gesagt hab ich nicht darauf gewartet und schnell eine Düse konstruiert und gedruckt. Andrea von RobotFactory hat sich zumindest bei mir dafür bedankt. Ob das schon 100% paßt sehen wir später. Im Moment sieht es gut aus.
 |
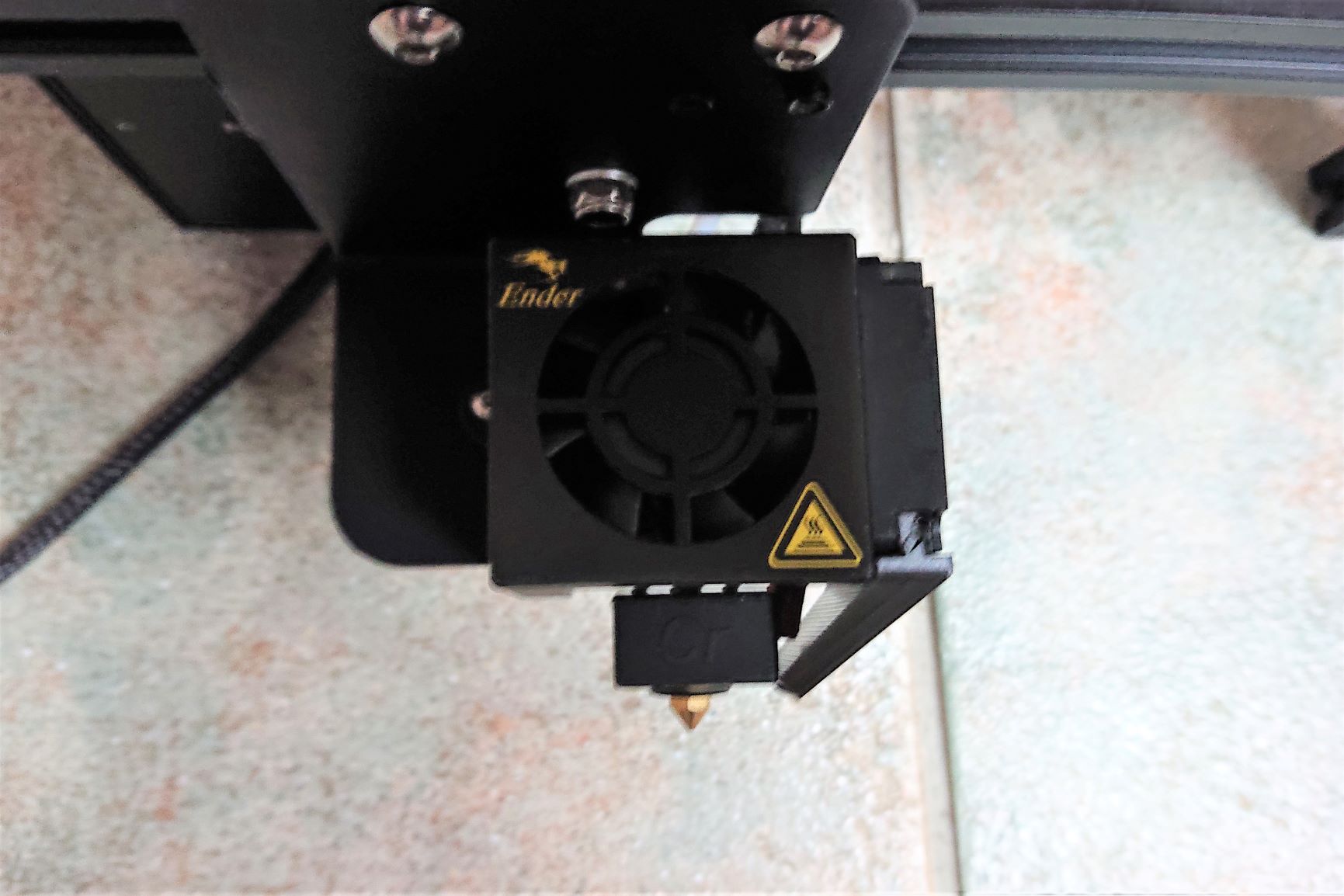 |
Wer das Kit kauft bekommt die Düse ab jetzt dazu.
Als Nächstes kommt an die alte Brücke ein Blechteil für den 45° Winkel. Über den kleinen Tippfehler in der Anleitung bei der Schraubengröße sehe ich hinweg. Das mit M5x8 das Blechteil an der Stirnseite des Aluprofils angeschraubt werden soll halte ich aber für etwas schwach. Doppelter Gewindedurchmesser als minimale Einschraubtiefe bei Aluminium also mindestens 12mm Schraubenlänge. Ich hab da 20mm Schrauben verwendet.
 Der Unterbau des Gurtförderers ist aus Blechteilen mit Schrauben M3 zusammen gesetzt und trägt das alte Heizbett. Sicher halten das diese kleinen Schräubchen aber es sieht verdammt zierlich aus. Bereits jetzt beginnen die Blechteile einen unangenehm klingenden Resonanzkörper zu bilden. Vermutlich wird das Teil am Ende nach Blechkiste klingen. Wer noch eine Isoliermatte hat sollte diese in die Blechwanne einkleben. Die dämmt dann nicht nur die Wärme sondern auch das scheppernde Blech.
Der Unterbau des Gurtförderers ist aus Blechteilen mit Schrauben M3 zusammen gesetzt und trägt das alte Heizbett. Sicher halten das diese kleinen Schräubchen aber es sieht verdammt zierlich aus. Bereits jetzt beginnen die Blechteile einen unangenehm klingenden Resonanzkörper zu bilden. Vermutlich wird das Teil am Ende nach Blechkiste klingen. Wer noch eine Isoliermatte hat sollte diese in die Blechwanne einkleben. Die dämmt dann nicht nur die Wärme sondern auch das scheppernde Blech.
 |
 |
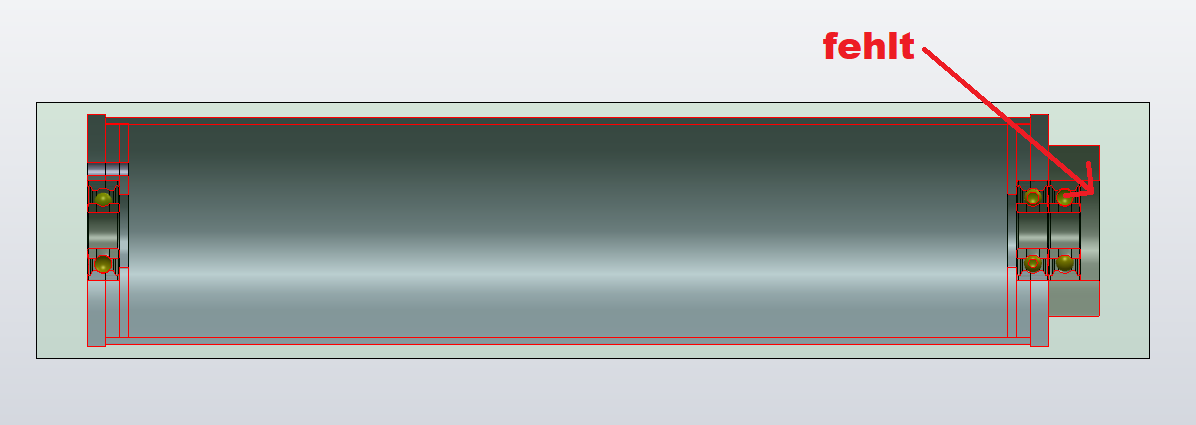
 Lagerspiel Lagerspiel |
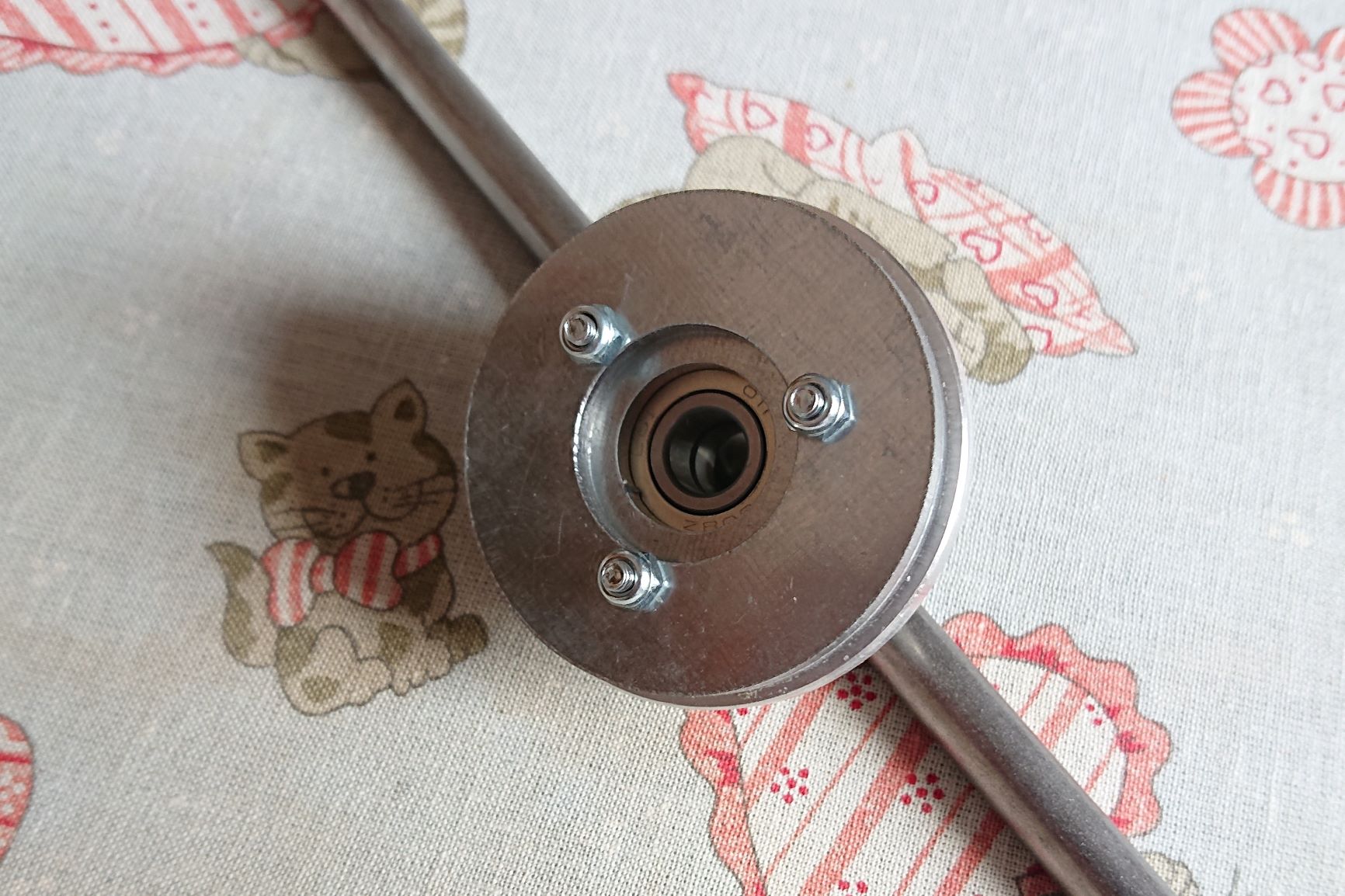 geänderte Scheibenanordnung geänderte Scheibenanordnung |
Nun zu den Rollen. Ich hab viel mit Rollen in der Fördertechnik zu tun aber das hab ich so noch nicht gesehen. 3 Bleche bilden zusammen geschraubt den Lagersitz und werden mit Epoxyd-Harz in ein Alurohr geklebt. Die Senkkopfschrauben mit Kreuzschlitz mag ich zwar nicht aber das ist nicht der Aufreger. Warum diese Sicherungsmuttern und kein Gewinde in der letzten Blechscheibe. Auch das die Lager mit den Schraubenköpfen geklemmt werden ist schon eigenwillig. Das funktioniert aber alles noch bei den 3 normalen Flanschen. Beim Flansch mit der Zahnriemenscheibe widerspricht sich dann die Anleitung mit der Schnittdarstellung aus dem CAD und am Ende klappern da die Lager herum. Da sollte ein Distanzring rein aber der liegt hier nicht bei. Wie durch Zufall paßt es aber wenn man die beiden inneren Scheiben tauscht. Die Lager sitzen dann etwas weiter außen aber das scheint nicht zu stören. Weglassen der Scheibe mit großem Loch wär keine gute Idee. Das verkürzt den Flansch und gerade hier muß das Drehmoment übertragen werden. Jetzt ist ohnehin zu spät. Alles ist verklebt. Ich hab mir erlaubt, den Teil der Rollenmontage aus der Anleitung zu übersetzen und zu ändern. Hier als pdf.
 |
 |
 Ist alles recht schlecht erreichbar bei der Montage. Der Metallgurt ist ständig im Weg. Irgendwie hat es dann aber doch funktioniert. Die Antriebsrolle sitzt nicht mittig aber ohne Spiel und durch meine Änderung war die Zahnriemenscheibe in der Anleitung falsch rum auf den Stepper gesetzt. Man könnte sicher auch die Distanzstücke anpassen. Die Befestigung des Steppers ist nicht nachvollziehbar. Der Zahnriemen muß mit dem Stepper gespannt werden und alles ist ohnehin schon schwer zugänglich. Warum sollen da Madenschrauben eingeschraubt und mit selbstsichernden Muttern fest gezogen werden. Ich hab einfach 4 kurze Linsenkopfschrauben mit Innensechskant M3 verwendet. Ich komme mit dem Inbus-Schlüssel eher dort rann als mit einem Schraubenschlüssel. Auf der gegenüberliegenden Seite hat die Rolle keine definierte Lage. Ich hab da 2 4mm Plastescheiben gedruckt und beigelegt. Die verbleibenden 1mm Spiel kann ich verkraften. Mit 2 Madenschrauben M4x40 wird der Gurt gespannt und der Zug liegt dauerhaft auf diesen Madenschrauben. Das hab ich so auch noch nicht gesehen.
Ist alles recht schlecht erreichbar bei der Montage. Der Metallgurt ist ständig im Weg. Irgendwie hat es dann aber doch funktioniert. Die Antriebsrolle sitzt nicht mittig aber ohne Spiel und durch meine Änderung war die Zahnriemenscheibe in der Anleitung falsch rum auf den Stepper gesetzt. Man könnte sicher auch die Distanzstücke anpassen. Die Befestigung des Steppers ist nicht nachvollziehbar. Der Zahnriemen muß mit dem Stepper gespannt werden und alles ist ohnehin schon schwer zugänglich. Warum sollen da Madenschrauben eingeschraubt und mit selbstsichernden Muttern fest gezogen werden. Ich hab einfach 4 kurze Linsenkopfschrauben mit Innensechskant M3 verwendet. Ich komme mit dem Inbus-Schlüssel eher dort rann als mit einem Schraubenschlüssel. Auf der gegenüberliegenden Seite hat die Rolle keine definierte Lage. Ich hab da 2 4mm Plastescheiben gedruckt und beigelegt. Die verbleibenden 1mm Spiel kann ich verkraften. Mit 2 Madenschrauben M4x40 wird der Gurt gespannt und der Zug liegt dauerhaft auf diesen Madenschrauben. Das hab ich so auch noch nicht gesehen.

Der Rest vom Förderband hat keine Probleme mehr gezeigt. Einzig das Aufbringen des Kaptonbandes wird noch eine Herausforderung.
Die übrige Mechanik ist kein großes Ding mehr. Ein paar Nutensteine zum eindrehen in die Nut hätten das Leben etwas einfacher gemacht aber was soll es. Die Bauteillüfterdüse braucht noch etwas Beachtung. Es geht sehr knapp zu. Ausrichten muß ich den Drucker auch noch. Kleiner Tipp. Das beiliegende Motorkabel vor dem Aufsetzen der Brücke einstecken. Danach kommt man da nicht mehr ran. Jetzt erstmal die Firmware und die Kabel.

Da hat Andrea gute Arbeit geleistet! Für jedes Board eine Firmware als Source mit Beschreibung der Einstellungen. Bevor ich da aber selber etwas ändere hab ich die fertige bin auf das Board gespielt. Beim 4er Board mit SD kein großes Problem. Da hier für den Bandantrieb ein deutlich stärkerer Stepper verbaut ist muß die Reverenzspannung für Z auf 1.41V erhöht werden. Kurze Erklärung: Der Gurt wird hier zur Z-Achse und die schräg gestellte Spindel zur Y-Achse. Entsprechend muß auch neu verkabelt werden. Z-Endschalter gibt es nicht mehr. Wer das alte Board verwendet könnte hier also einen Filamentsensor anschließen. Leider fehlt das 4er-Board in der Anleitung mit dem Anschlußschema. Also reich ich es hier nach und die Anleitung für Firmware und Reverenzspannung.

Erster Funktionstest ist OK. Nach der Y-Achse muß ich nochmal sehen. Die klingt nicht gut. Ausgerichtet wird mit dem Blechwinkel. Ist dennoch nicht einfach gleichzeitig den Abstand von 50mm nach hinten im Auge zu behalten und auf beiden Seiten die gleiche Höhe. Eine genaue Gewindebohrung mit einer Bohrlehre in den Alurahmen währe wohl doch nicht schlecht. Den nicht benötigten Blechwinkel zur Befestigung der Steuerungsbox hab ich nun doch noch verbaut. Er hält provisorisch den Filamentsensor der noch die Führung des Filaments übernehmen muß. Zum Schluß kommt eine Rolle als Niederhalter auf das Band. Da muß aber zuvor noch das Kapton aufgebracht werden. Sonst sieht es schon gut aus. Rund um die Düse geht es sehr knapp zu aber das könnte so passen.
 |
 |
 |
 |
 |
 |
 Treiber |
Alex hat diese Aufstellung zu den auf dem Board verbauten Treibern entdeckt. So mancher wird sich schon über den Buchstaben auf dem SD-Kartenleser gewundert haben. Wenn ich nun auf mein Board blicke sind hier also TMC2225 verbaut und leider gibt es in der Anleitung keine Angaben zu den Vrev-Werten für diesen Treiber. Da ich inzwischen eine 2.Spindel für die Y-Achse verbaut habe und diese parallel angeschlossen ist muß da definitiv eine höhere Reverenz-Spannung verwendet werden. Die Frage bleibt welche. |
Wenn Ihr schon Erfahrungen damit habt oder einfach nur eine Meinung dazu dann immer her damit. Im Forum hab ich ein Thema dazu eingerichtet.
Beitrag ergänzt.
Creality hat bei seinem Roller noch Stützen nach vorn. Das könnte auch hier Sinn ergeben.
Ansonsten, cooles Projekt und mal etwas anderes als einfach nur auspacken 😉
Ja! Einfach auspacken ist hier definitiv nicht. Ich geb Dir auch mit den fehlenden Streben Recht. Das hier nur ein gekantetes Blech diese Brücke hält find ich auch etwas wenig. Man muß aber aufpassen, daß man nicht mit beweglichen Teilen kollidiert und da muß ich erstmal sehen ob und wie ich das hinbekomme.
Wow, sieht ja Hammer aus!
Bin auf die ersten drucke gespannt.
Danke! Auch nochmal für das Board! Dann hab ich wohl ein gutes Licht verwendet. Na er sieht mal anders aus und nun kaum noch nach Ender-3. Ich hab mich bemüht, die lieblos übergangenen Stellen (wie offene Steuerbox, das Netzteil, hinten offenes Display oder „Überlandleitungen“) an dem Drucker etwas gefälliger zu gestalten und den WAF zu erhöhen. Der Rest ist ja schon von den Teilen vorgegeben. Als Konstrukteur hätte ich da vieles anders gebaut aber bevor ich da was grundlegend umbaue versuch ich das nach den Vorgaben von robotfactory umzusetzen.