
3D Scanner BQ Ciclop
Als Fertiggerät ist der Ciclops aus dem Hause BQ bereits um 250,00 Euro erhältlich, als Bausatz zum Selberdrucken ist er noch deutlich billiger. Was kann man von einem 3D Scanner für so wenig Geld erwarten?
Der BQ Ciclop besteht aus 2 vertikal angeordneten roten Linienlasern, einer Logitech C270 Webcam und einem motorisierten Drehteller. Während des Scanvorgangs tasten beide Laser abwechselnd immer eine Zeile des Objektes ab, dann dreht der Drehteller ein paar Grad weiter, die Laser scannen wieder bis er einmal komplett rum ist.
Angeschlossen wir der Ciclop über 2* USB: einmal USB für die Kamera, einmal USB zur Ansteuerung der Elektronik im Ciclop und natürlich noch Strom über das mitgelieferte 220V Netzteil. Der Betrieb an meinem USB Hub hat übrigens nicht funktioniert, geklappt hat es erst, als ich beide USB Kabel hinten an den PC eingesteckt hatte.
Vom eigentlichen Handling her ist das im Gegensatz zum zuvor getesteten iSense Scanner schon deutlich bequemer, weil ich nicht um das Objekt herum laufen muss und den Scanner einfach machen lassen kann. Aber dieses Scanprinzip hat auch einige Nachteile:
- Das Objekt darf nicht mehr wie 20cm hoch sein, und muss auf den Drehteller passen.
- Das zu scannende Objekt muss penibelst genau in der Mitte des Drehtellers angeordnet werden, sonst kommt es mithin zu extrem störenden Verzerrungen.
Das richtige Anordnen is nicht einfach, denn wo ist genau die Mitte von z.b. einem Spielzeugauto oder einem „Benchy“ Boot? Und wo ist sie, wenn ich das Boot seitlich lege für einen 2. Durchlauf?
Je genauer man die Mitte des Objekts auf die Mitte des Drehtellers bekommt, umso exakter wird der Scan. Das ist bei einem geplannten Scan Durchlauf schon schwierig genug, will man aber 2 oder mehrere Einzelscans zusammen setzen, z.b. einmal normal die Seiten im ersten Durchgang und dann nochmal flach liegend Decke und Boden scannen, dann wird die korrekte Positionierung extrem schwierig, in der Regel ist der 2. Scan dann deutlich anders verzerrt als der erste und dann wirds kompliziert. - Die Beschaffenheit des Objektes ist extrem wichtig: es darf nicht glänzen, es sollten keine Überhänge da sein, es soll nicht schwarz sein, nicht transparent, definitiv nicht rot und blau ist auch heikel und je nach Umgebungslicht sind auch andere Farben problematisch.
Im Handel gibt es spezielle Mattierungssprays (oder Babypuder), aber danach ist ordentlich Putzaufwand bis das Zeuch wieder restlos aus jeder Ecke, Furche und Winkel des Objektes weggewischt ist. - je runder das Objekt, umso besser. Tonnen- oder Kegelförmig ist am einfachsten – drum benutzt BQ auch einen Totempfahl in seinem Beispiel, für sowas ist der Ciclops am besten geeignet, der hat zudem keine großen Überhänge, seine Oberseite keine wesentlich Merkmale (mit dem Scan der Oberseite ist meist essig). Eine Aktionfigur geht, allerdings sind die Arme meist Überhänge, die machen Probleme.
- Die Beleuchtung im Raum spielt eine enorm große Rolle, zumindest wenn man in Farbe scannen will. Helles Sommertageslicht ist gift. Licht und Schatten ist auch nicht gut. Nicht zu hell und nicht zu dunkel, und schön gleichmäßig ausgeleuchtet muss es sein, vor allem wenn man farbig scannen will. Das Licht muss so beschaffen sein, dass die Kamera die Laserlinien deutlich erkennen kann. Einfacher ist es jedoch ohne Farbe, die uns 3D-Druckern ja eh nichts hilft. Ohne Farbe funktioniert es sogar im Dunkeln – und das sogar recht gut.
Der Ciclop macht hübsche farbige Punktwolken..
Die OpenSource Software Horus, die zum Scannen verwendet wird, hat zwar viele Möglichkeiten zur Kalibrierung, aber kann immer nur einen einzigen Scan geöffnet haben. Man scannt also damit, dann speichert man die beim Scan erstellte Punktwolke ab und startet den nächsten Scan. Groß Nachbearbeiten, in ein druckbares Format konvertieren oder das Zusammensetzen mehrer Punktwolken aus unterschiedlichen Scans geht nur mit Hilfe zusätzlicher Software: Meshlab oder auch Cloud Compare sind gängige Freeware/Open Source Lösungen dazu, aber beide Programme haben eine sehr steile Lernkurve.
.. aber kein druckfertigen STL Dateien
Das erstellen von druckfähigen STL Dateien aus den in Horus abgespeicherten Punktwolken benötigt einiges an Studieren und Rumprobieren in der von für Neulinge meiner Meinung völlig unverständlichen Funktions- und Parameterflut von Meshlab oder Cloud Compare. Da war die iSense App die das komplett alles auf Knopfdruck gemacht hat von der Einfachheit her ein wahres Vergnügen dagegen.
Die in der BQ Anleitung vorgestellte Vorgehensweise zum errechnen der Normalen z.b. taugt vielleicht für den Totem aus dem Beispiel, geht aber z.b. bei einem gescannten Benchy komplett in die Hose, da muss man erst mal drauf kommen wo man da nun an welchen Einstellungen schrauben soll – ich hab bestimmt einen halben Tag gefummelt, bis ich überhaupt mal irgendein Ergebnis hatte, von „gut“ will ich gar nicht reden (siehe unten). Da darf man nicht ungeduldig sein. Und vor allem: das ist nur was für Leute, die Spass am Frickleln mit Softwareparametern haben. Das ist absolut kein Point & Click und ab zum Drucker damit.
Persönlich favorisiere ich Cloud Compare, das erschlägt einen jetzt nicht ganz so sehr mit unbekannten Funktionen und es scheint mir merklich performanter. Meshlab ist da echt Hardcore, es läuft zum Teil sehr zäh, mal 20 Minuten warten trotz eigentlich anständiger Hardware (aktueller i7 mit 16gb RAM, allerdings ältere Nvidia GTX780) muss man durchaus einplanen und es neigt dazu, sich gerne Mal unmotiviert zu verabschieden, sprich es stürzt des öfteren ab..

Dolly kann ein Lied von singen: beim Clonen gibts Verluste – Benchy vor und nach dem Scan
„Ergebnisse“ aus einer Woche Harter Kampf:
Vorneweg gleich wieder der Hinweis: die hier gezeigten Ergebnisse sind mit einem Minimum an Nachbearbeitung so vom Scanner gekommen. Ich gehe davon, dass talentiertere Personen, Leute mit mehr Ahnung von der Materie oder mit mehr Zeit / Spass am Frickeln wesentlich bessere Resultate erhalten können. Das nachfolgende ist, was ich innerhalb von ein paar Tagen zustande gebracht habe – es gilt wie immer der Vorbehalt: vielleicht bin ich ja auch zu doof zum Scannen?
Die 2 ersten 2 Objekte kennt ihr schon aus dem iSense Test (falls ihr den gelesen habt)
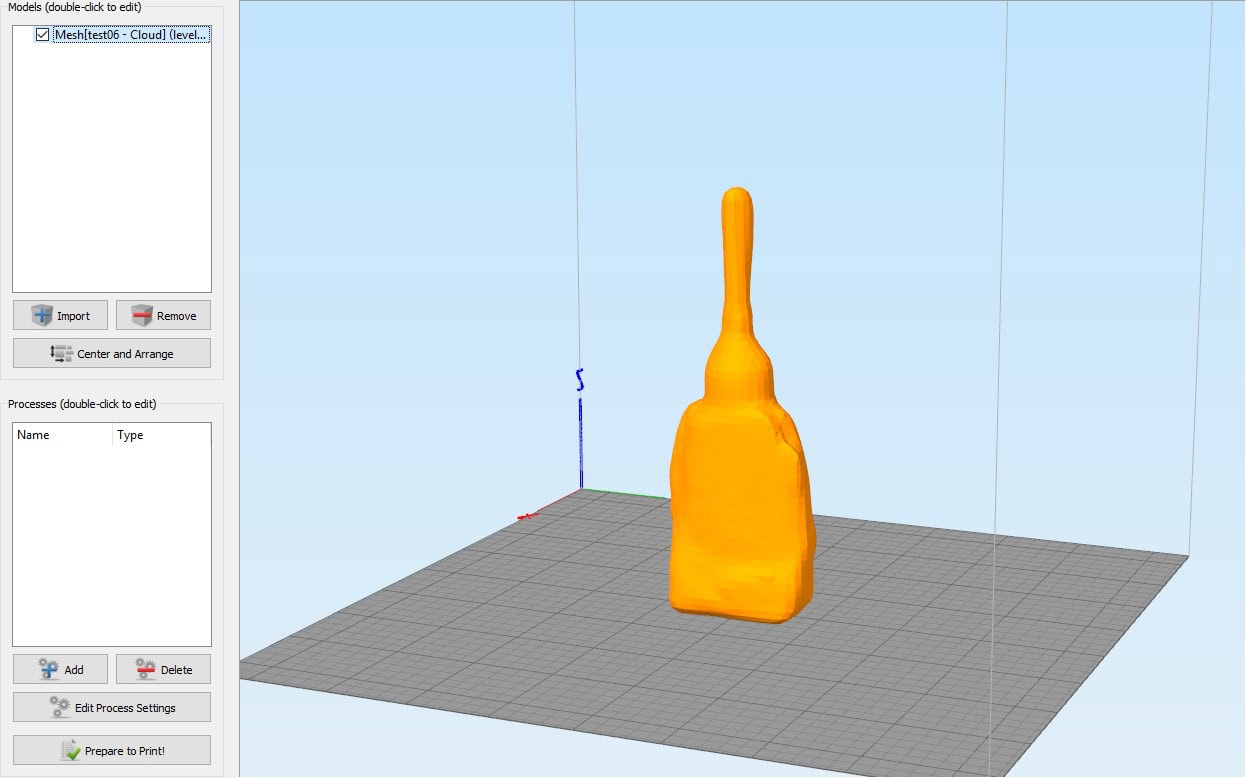
Die Uhu Flasche. die dünne Spitze war wohl doch nicht im Mittelpunkt und ist verzerrt. Ich glaub die glänzende Oberfläche war schuld an der etwas missglückten Form der Flasche..
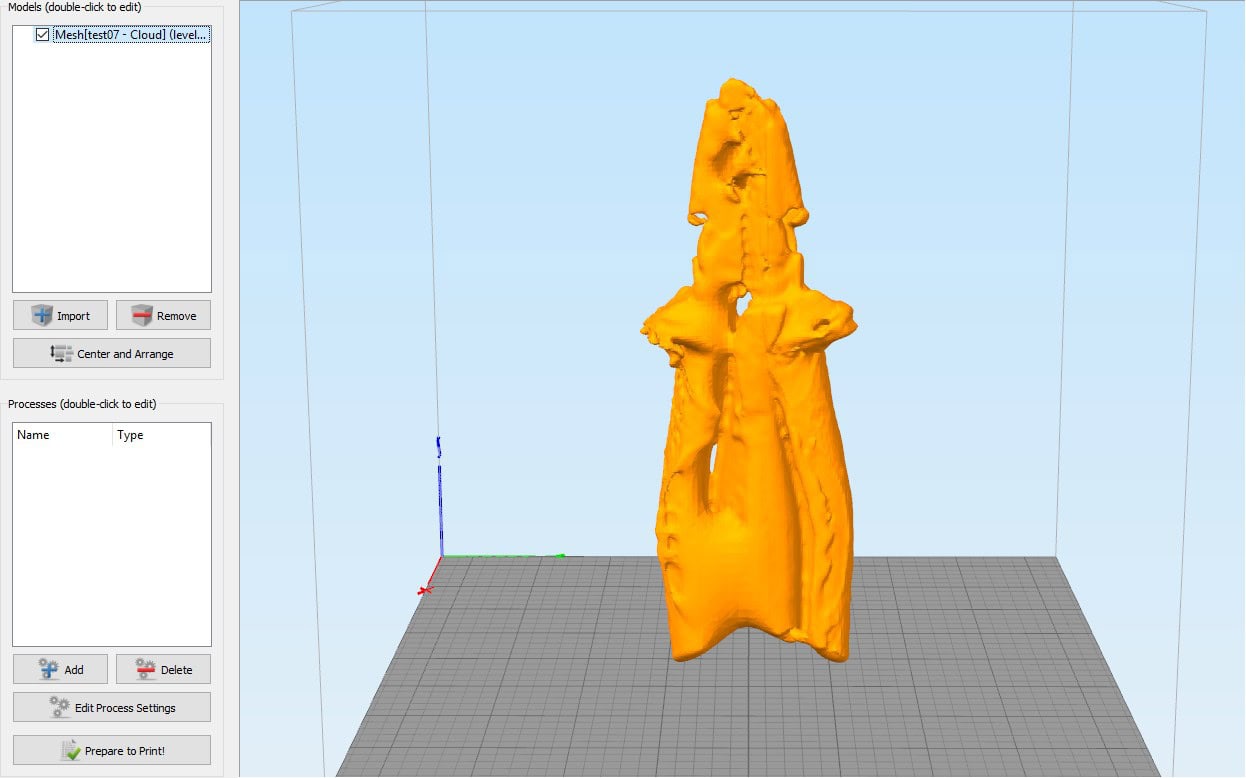
Ohje.. die roten Griffschalen der Zange hat er nicht erkannt, Meshlab hats dann irgendwie geschlossen, aber das ist schon etwas mager, oben happerte es am matt-schwarzen Metall. Die Zange steckte zum Scan in einem Berg blauer Knete, blaue Knete ist für den Ciclop komplett unsichtbar.
Die Testobjekte Schraubstock und Zange flach aus dem iSense Test gingen gar nicht: die Zange ist komplett rot, der Schraubstock geht nicht auf den Drehteller. Dafür hier 2 neue Scans:
Eine billige Laser-Wasserwaage ausm Baumarkt, in 2 Durchgängen gescannt, einmal normal, einmal auf der Seite liegend, um den Teil oben und den Boden zu erfassen. Zusammengerechnet mit Cloud Compare. Das Ergebnis im Vergleich zu früheren Versuchen noch ganz ok, die Libellen oben drauf kann man nur erahnen, genauso wie das Drehrad an der Seite..
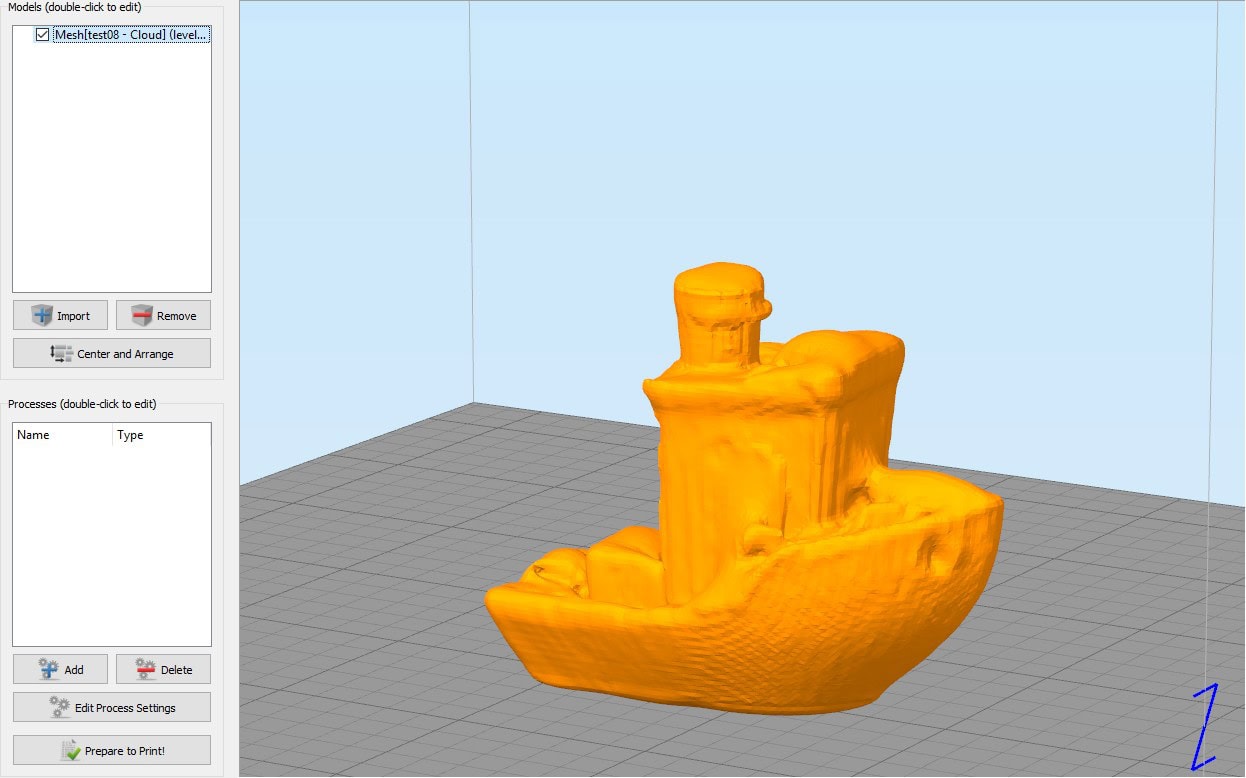
Bissl wulstig, das Benchy, der Kamin verzerrt.. Muss wohl grad ein Schneesturm aufgekommen sein als nicht geschaut habe..
Und, wieder einmal mein bester Scan:
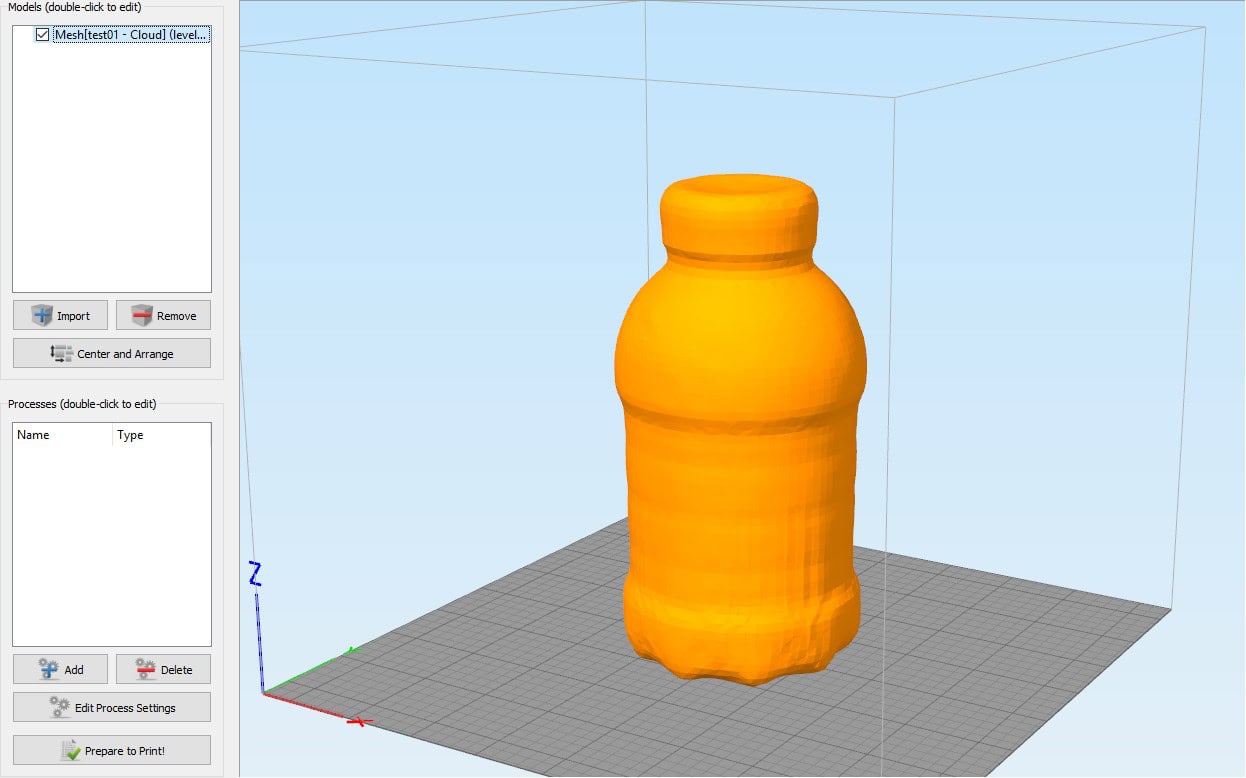
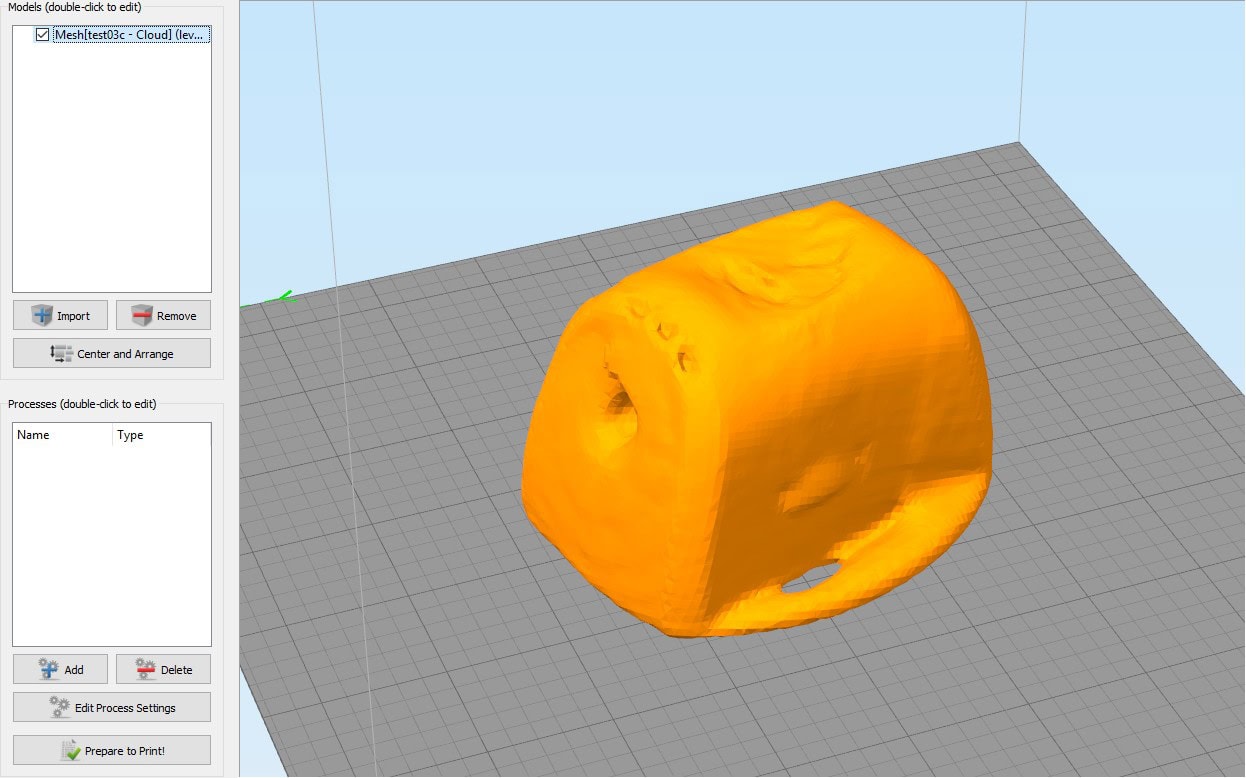
Eine Flasche Müllermilch. Den Scan finde ich echt gut, entspricht aber auch wie der Totempfahl aus der Anleitung dem, was ich als Ideal für diesen Scannertyp bezeichnen würde. runde tonnenartige Objekte ohne Überhänge.
Weitere Probleme beim Scan:
- Zuerst hatte ich trotz zig mal Laser kalibrieren in Horus einen deutlichen Versatz vom linken Laser zum rechten Laser, der durch die Kalibrierung nicht behoben wurde. Penibel nachmessen und Einstellen aller Abstände und Längen der Gewindestangen brachten hier schließlich Erfolg. Irgendwie kam es mir vor, als ob die Laserkalibrierung gar keinen Effekt hatte.
- Nicht zu korrigieren waren die Farbunterschiede bei den 2 Lasern, der Scan des rechten Lasers war merklich dunkler als der des Linken, egal wie ich das Licht hatte: beim Farbscan gab es sichtbare Unterschiede, umgehen konnte ich es, in dem ich nur mit 1 statt 2 Lasern gescannt habe.
- Bei der Plattformkalibration nervte dutzende Male „Kalibrierung fehlgeschlagen“, obwohl es zuvor problems durchlief lief und alle anderen Tests inkl. Schnelltest und Probescans funktionierten. Eine Doku oder auch nur Hinweise warum und wieso und wie beheben habe ich nicht gefunden, irgendwann lief es dann plötzlich.
Erhältlich in 2 verschiedenen Kits:
Das Gerät wurde mir freundlicherweise von 3DJake.de zum Test vor einer Kaufentscheidung zugeschickt. Es erreichte mich bereits fertig montiert, so dass ich zum Aufbau nix sagen kann.
Grundsätzlich ist der BQ Ciclop in 2 Varianten erhältlich: das komplette Set inkl. aller benötigter Teile zum Selbstaufbau bei 3DJake 249,00 Euro oder als „Nur Elektronik“-Set für 160,00 Euro, wo alle Plastikteile selbst ausgedruckt werden müssen. Der Haken am Elektronik Set ist aber: da fehlt das große Kugellager für den Drehteller, das ist auch nicht einfach zu finden und nicht so gut zu drucken, darum war diese Variante für mich von vornherein uninteressant.
Mein Fazit:
Der BQ Ciclop ist für einen anderen Anwendungsfall als der iSense gedacht, Drehteller vs. freies Scannen eben. Drehteller ist super bequem, aber dafür ist das erstellen druckfähiger STL Dateien schon etwas eine Qual.
Der Ciclop ist jetzt vom Preis her nicht so teuer, als dass man es nicht mal auf einen Versuch ankommen lassen könnte, er wirkt ordentlich stabil trotz gedruckter Teile und mit bissl Fleiß und Übung unter guten Bedingungen kommen auch mal Scans raus, die man vorzeigen kann.
Der Ciclop ist ein netter Zeitvertreib für Bastler, die Spaß am Experimentieren haben. Wer Point & Click und Druck sucht, der ist hier komplett Fehl am Platz, das gibt die Software (noch?) nicht her, die Hardware könnte es.
PS: Das Benchy stammt von CreativeTools und ist hier auf Thingiverse erhältlich
ich habe den bq ciclop habe alles versucht mal klappts mal nicht
selbsttest klappt nicht– ab und zu doch zentrieren klappt nicht überspringen wie soll ich das ding denn eistellen?
nun muss ich erst mal aufhören mit dem versuchen sonst werde ich noch irre.muss ich win10 64 bit oder win10 haben?
WER HAT AHNUNG VON ANFANG AN.
Kurz: ich nicht. Ich hab den kurz nach Ende dieses Tests dann endgültig eingemottet. Zuviel Aufwand für zuwenig Nutzen leider, wenn nicht grad irgendwas wieder spinnt und nix geht..
Wie soll Ich denn das Objekt exakt in der Mitte platzieren?!?
Das geht doch gar nicht (?).
Wenn das ein 3D-Druckbarer Laserscanner ist, gibt es dann nicht auch Solche, die größer sind?
Ein billiger 3D-Drucker kann heute 30x30x40cm als kleinste Version haben.
Da will man auch entsprechend scannen können.
Z.B. mal ein gehyptes Mini-ITX-Gehäuse, dass mindestens €200 neu kosten würde.
Ich hätte gar kein Interesse an der 1:1-Kopie, Ich hätte gerne eine grobe Oberfläche (ist schon durch Billigdruck gegeben ;-] ), Tragegriff, hinten eine Box vor den Anschlüssen (um WLAN-Antennen, Kabel, Stecker etc. bei Transport am Gerät zu lassen) etc..
Könnte ein Kinect, z.B. Kinect One für Windows ein besseres Ergebnis liefern?
Das Teil hat ja einen eigenen Infrarot-Punkte-Tiefenscanner der sogar für ganze Räume gedacht ist…
Ich habe so ein Teil da. Es bräuchte nur ein 3D-Druckbaren Laserscanner, wo Ich den einsetzen kann.
Das ist genau eines der Probleme, ja, wie soll man das vernünftig zentriert da drauf packen.
Du kannst Dir auch größere Scanner bauen, oder mit einer andere Scantechnik dann auch dein Auto/Haus/etc „streifenweise“ scannen. Auch mit dem Kinect kann man Sachen scannen für den 3D-Druck, eher größere Sachen als beim Ciclop, dafür mit nicht ganz so hoher Auflösung, weil, wie Du schon sagtest, der ist dazu gedacht, Personen und deren Bewegung im Raum zu erkennen, nicht bei einer 8cm Miniatur feinste Details zu erfassen. Aktuell ist es zumindest so, dass der Scanner zum Verwendungszweck passen muss und der sehr billige Ciclop taugt halt nur nur einen sehr begrenzten Anwendungsfall und braucht ganz viel Probiererei, bis da was rum kommt bei, das man wirklich brauchen kann.
Ein Mini-ITX Gehäuse würde ich nicht scannen, sondern in ner CAD Software zeichnen, da kommst schneller ans Ziel.
Wobei die Elektronik gerade mal ein Bruchteil Wert ist…Entsprechende Elektronik Komplett-Kits gibts es auf der Bucht schon für 13 Euro aus China, oder ca. 18 Euro aus Deutschland!
Die Teile sind einfach zu drucken und das Kugellager hab ich auch auf der Bucht für 13 Euro geschossen…den komplette Scanner nachzubauen hat mich ca. 80 Euro gekostet!
Jetzt mal anders gefragt: wie zufrieden bist Du mit der Scan Qualität? 80,00 Euro Gesamtkosten ist ja durchaus tragbar, zumal man für die Teile auch Filament wegdrucken kann, dass man sonst eh zu nix anderem nutzen würde. Das wird also gefühlt dann noch günstiger.
Das ersteinstellen, gestaltet sich wohl eher nicht im Plug and Play Prinzip! Also sollte man auch meiner Meinung nach technisch versiert sein und/oder den elan haben sich reinzufuchsen! Erleichtert hat mir den Vorgang an sich, eine beleuchtete weiße Fotokammer zu bauen damit optimale Licht- und Kontrastverhältnisse herrschen! Anleitungen findet man ja zu Genüge im Netz. Das Objekt vorher leicht mit Wasser zu benetzen und einzupudern hat sich auch bewährt! Wer eine Plug and Play Variante bevorzugt, muss leider zu einer wesentlich teureren Fertiglösung greifen! Was meiner Meinung nach , jedenfalls aus meiner Sicht, unproportional teuer erscheint gegnüber dieser Open Source Lösung!
Ausserdem bin Ich begeisterter Fan und Anhänger der Open-Source Community, da ich nicht einsehen mag, großen Konzernen in die Tasche zu wirtschaften!
VlG Sebastian
Die Qualität an sich ist meiner Meinung nach für den Otto Normalverbraucher volkommen ausreichend, wenn die Einstellungen und das Scanumfeld stimmen!
Guten Morgen,
die beiden Angebote bei Amazon sind nicht vergleichbar!
Der Scanner kommt immer als Bausatz! Der Preiswerte Satz ist nur die Elektronik, nicht der komplette Scanner!
Gruß
Marcus Vogel
Moin Marcus,
Ich versteh den Hinweis grad nicht.. Nicht vergleichbar mit was? Den Unterschied zwischen 249 Euro und 160 Euro Kit hatte ich doch oben im Text schon beschrieben. Steh ich grad auf der Leitung?
Grüße,
Stephan