Duet 2 Maestro – Einsatz
 Duet3d bietet inzwischen vier 32bit-Boards an. Das Duet 2 Maestro ist das kleinste, bietet aber immer noch Ethernet, Webserver, TMC-Motor-Treiber und vieles mehr. Als einziges Duet Board unterstützt es Dreh-Klick-Anzeigen, so dass typische „China-Drucker“ damit aufgerüstet werden können. Ich hab‘s in meinen Ender-2-Frankenstein eingebaut.
Duet3d bietet inzwischen vier 32bit-Boards an. Das Duet 2 Maestro ist das kleinste, bietet aber immer noch Ethernet, Webserver, TMC-Motor-Treiber und vieles mehr. Als einziges Duet Board unterstützt es Dreh-Klick-Anzeigen, so dass typische „China-Drucker“ damit aufgerüstet werden können. Ich hab‘s in meinen Ender-2-Frankenstein eingebaut.
Überblick über die Duet3d Baords
Von Duet3d gibt es inzwischen vier Boards:
 Duet 2 Wifi Duet 2 Wifider Duet-Klassiker mit Wifi ca. 165 Euro |
 Duet 2 Ethernet Duet 2 Ethernetder Duet-Klassiker mit Ethernet statt Wifi ca. 185 Euro |
 Duet 2 Maestro Duet 2 Maestrodas „Abgespeckte“ mit Ethernet ca. 125 Euro hier vorgestellt |
 Duet 3 Duet 3das „Profi-Board“ mit CAN-Bus, SPI-Bus, etc. ca. 270 Euro |
Schon das Maestro deckt die Funktionalität für einen normalen 3D-Drucker mehr als vollständig ab. Hier einige Features der drei „2er“ Boards:
| Duet 2 Maestro | Duet 2 Ethernet | Duet 2 WiFi | |
| Preis | Ca. 125 Euro | Ca. 185 Euro | Ca. 165 Euro |
| Prozessor | ATSAM4S8C | ATSAM4E8E | ATSAM4E8E |
| Netzwerk | Ethernet | Ethernet | 2.4GHz WiFi |
| Stepper Treiber | 5x TMC2224 | 5x TMC2660 | 5x TMC2660 |
| Stepper Treiber Erweiterbarkeit | + 2 TMC2208/2224 oder step/dir/enable Treiber | +7, davon bis 5 TMC2660 |
+7, davon bis 5 TMC2660 |
| Thermistor/PT100/ PT1000 Eingänge |
4, für PT1000 optimiert, laufen auch mit Thermistoren, +2 Boards a 2 PT1000 möglich |
3, +2 Boards a 2 PT1000 möglich |
3, +2 Boards a 2 PT1000 möglich |
| Weitere Heater/Thermistor-Anschlüsse | s. Andere Erweiterbarkeit unten | +5 Heater und Thermistoren, +2 Boards a 2 PT100 |
+5 Heater und Thermistoren, +2 Boards a 2 PT100 |
| Endstop or filament monitor inputs | 5 on-board; STP pins are tolerant to accidental exposure up to 30V | 5 on-board, 7 expansion | 5 on-board, 7 expansion |
| Endstop Status LEDs | Nein | Ja | Ja |
| Z probe connector | 5 pin, 3 oder 5 V, Fremdspannungs- geschützt |
4 pin, 3V | 4 pin, 3V |
| Fans | 3 geregelt, 1 immer an; 2 Bänke a 5 oder Vin V |
3 geregelt, 2 immer an 5 oder Vin V |
3 geregelt, 2 immer an 5 oder Vin V |
| Servo support | 1 | 5 | 5 |
| LCD support | Panel Due oder LCD12864 | PanelDue | PanelDue |
Ein paar mehr Details findet Ihr in der Originaltabelle.
Das brandneue Duet 3 geht nochmal weit darüber hinaus. Es ist eine Option für den wirklich professionellen Einsatz. Hier im Forum ist noch kein Drucker aufgetaucht, für den man es sinnvoll benötigen würde.
Zu allen Mainboards bietet Duet3D eine ganze Reihe von Erweiterungsboards an.
Einlesen
Im September 2018 hatten wir das Duet 2 Ethernet vorgestellt. Sinngemäß gilt alles dort über die Duet-Welt Geschriebene auch für das Duet 2 Maestro. Ich möchte hier nicht alles nochmal wiederholen und verweise statt dessen ab und an auf diesen Duet 2 Blogbeitrag.
==>Es empfiehlt sich, genau jetzt erst einmal dort weiterzulesen.
Lieferumfang Duet 2 Maestro
Ich habe das Board im September 2019 im deutschen registrierten Fachhandel mit eigenem Geld gekauft.
Der Lieferumfang ist ganz ähnlich wie beim Duet 2 Ethernet: im kleinen Karton kommen gut gepolstert:
- das Board mit Micro-SD-Karte,
- 2 Tütchen mit Molex-Stecker-Gehäusen, Crimp-Kontakten und Kabel-Endhülsen,
- Aufkleber und Infokarte.
 Das Wichtigste, für das man bezahlt, ist aber die umfangreiche Dokumentation. Hier kann kein Wettbewerber auch nur im Ansatz mithalten. Duet3d spielt mit seiner Community in Sachen Dokumentation und Support in einer eigenen Liga.
Das Wichtigste, für das man bezahlt, ist aber die umfangreiche Dokumentation. Hier kann kein Wettbewerber auch nur im Ansatz mithalten. Duet3d spielt mit seiner Community in Sachen Dokumentation und Support in einer eigenen Liga.
Der Startpunkt zur umfangreichen Maestro-Dokumentation ist hier.
Dort sind alle relevanten Informationen verlinkt, auch zu Auswahl und Ansteuerung zahlreicher Druckerkomponenten.
Es gibt dort auch Tutorials von Jason Znack und anderen, die den Umbau eines Ender 3 auf das Maestro erläutern.
Schon wegen der Dokumentation und dem super Support hätte ich ein schlechtes Gewissen, einen China-Clone des Boards zu kaufen.
Das Projekt
Ich habe das Maestro gekauft, weil ich vom Duet 2 im X5PO begeistert bin und den Endermorph, meinen kleinen kruden Ender-2-Umbau, auch gerne über Web ansteuern wollte, ohne auf das LCD zu verzichten.
In gleichen Zug habe ich bei der Gelegenheit das kleine Dreh-Klick-Display des Ender 2 durch das 12864er ausgetauscht, das vom Tronxy X5S übriggeblieben war.
Erstkontakt
Bevor das Basteln losgeht, möchte man sehen, ob das „Baby“ lebt. Das geht am Schreibtisch mit dem nackten Board, einem USB-Kabel und ohne weitere Stromversorgung.
Das Board wird primär über sein umfangreiches Webinterface gesteuert. Dazu muss aber zunächst eine Netzverbindung hergestellt werden. Vom Werkstest ist auf dem Board eine feste IP-Adresse eingestellt, die z.B. über Telnet auf das eigene Netz angepasst werden muss. Oder man stellt gleich auf DHCP um. Wie für alles, gibt es in der Duet-Welt auch dafür einen Gcode, den man auch über Telnet schicken kann: M552. Das Vorgehen habe ich zum Duet 2 Ethernet schon beschrieben gehabt, bei Duet3d ist es hier nachzulesen.
Ich hab das Maestro auf DHCP konfiguriert. Wie der Screenshot zeigt, habe ich ein wenig rumprobiert. Letztlich scheint es mit einem Deaktivieren und anschließendem Aktivieren des Netzwerks für DHCP zu klappen:
M552 S0 M552 S1
 Die Fritzbox sollte immer die gleiche IP-Adresse vergeben, damit der Webserver unter der gleichen IP erreichbar bleibt.
Die Fritzbox sollte immer die gleiche IP-Adresse vergeben, damit der Webserver unter der gleichen IP erreichbar bleibt.
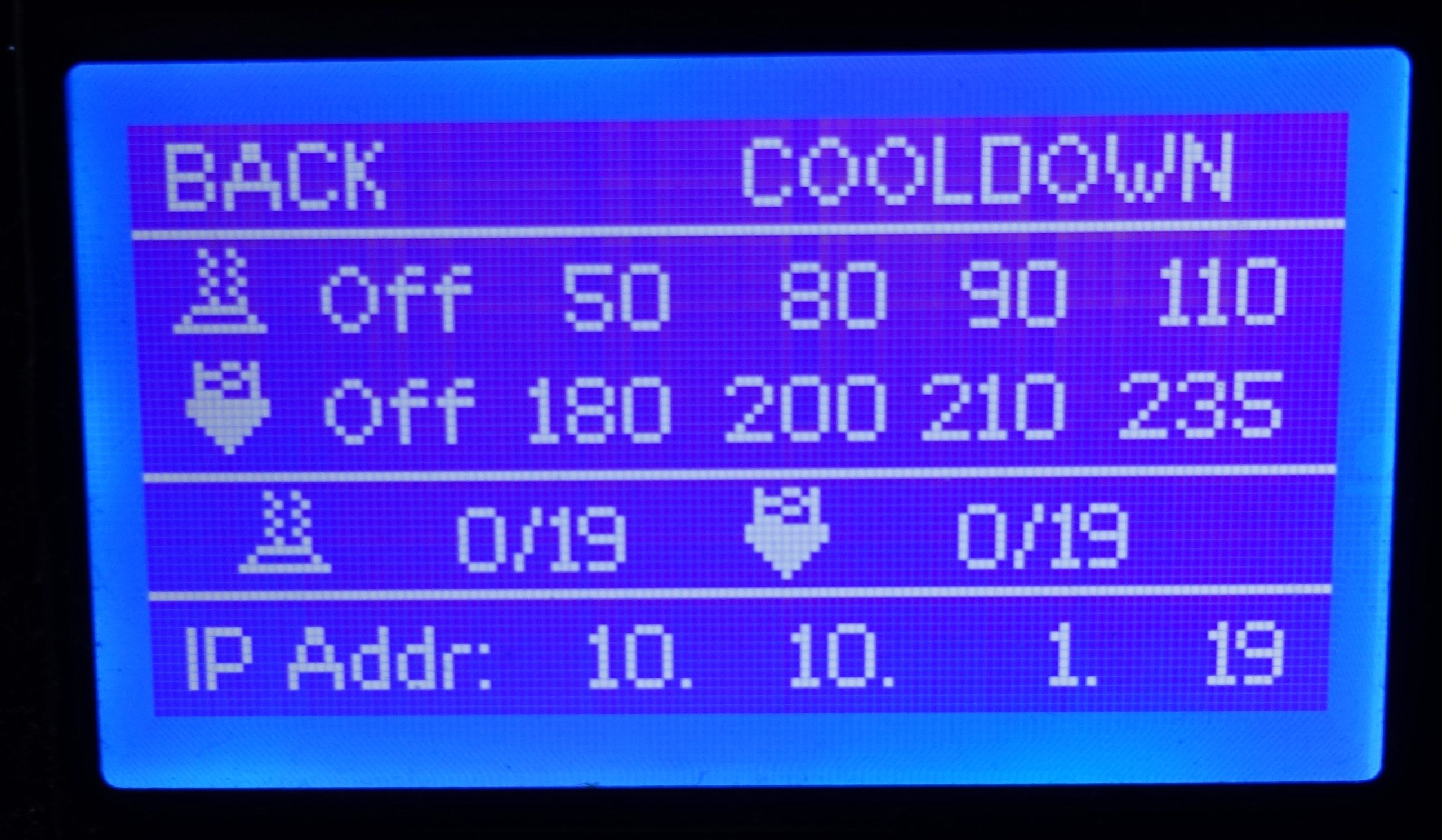
In meinem Setup wird die IP-Adresse später dann auch auf dem LCD angezeigt:
 Software:
Software:
Die Firmware kann man gleich jetzt „auf dem Schreibtsich“ aktualisieren falls notwendig, oder man startet erstmal mit der Firmware ab Werk und aktualisiert sie später.
Die Software auf dem Duet besteht aus drei Teilen:
1. RepRap-Firmware
Die Version kann über Telnet und M115 abgefragt werden …
FIRMWARE_NAME: RepRapFirmware for Duet 2 Maestro FIRMWARE_VERSION: 2.05 ELECTRONICS: Duet Maestro 1.0 FIRMWARE_DATE: 2019-12-13b1
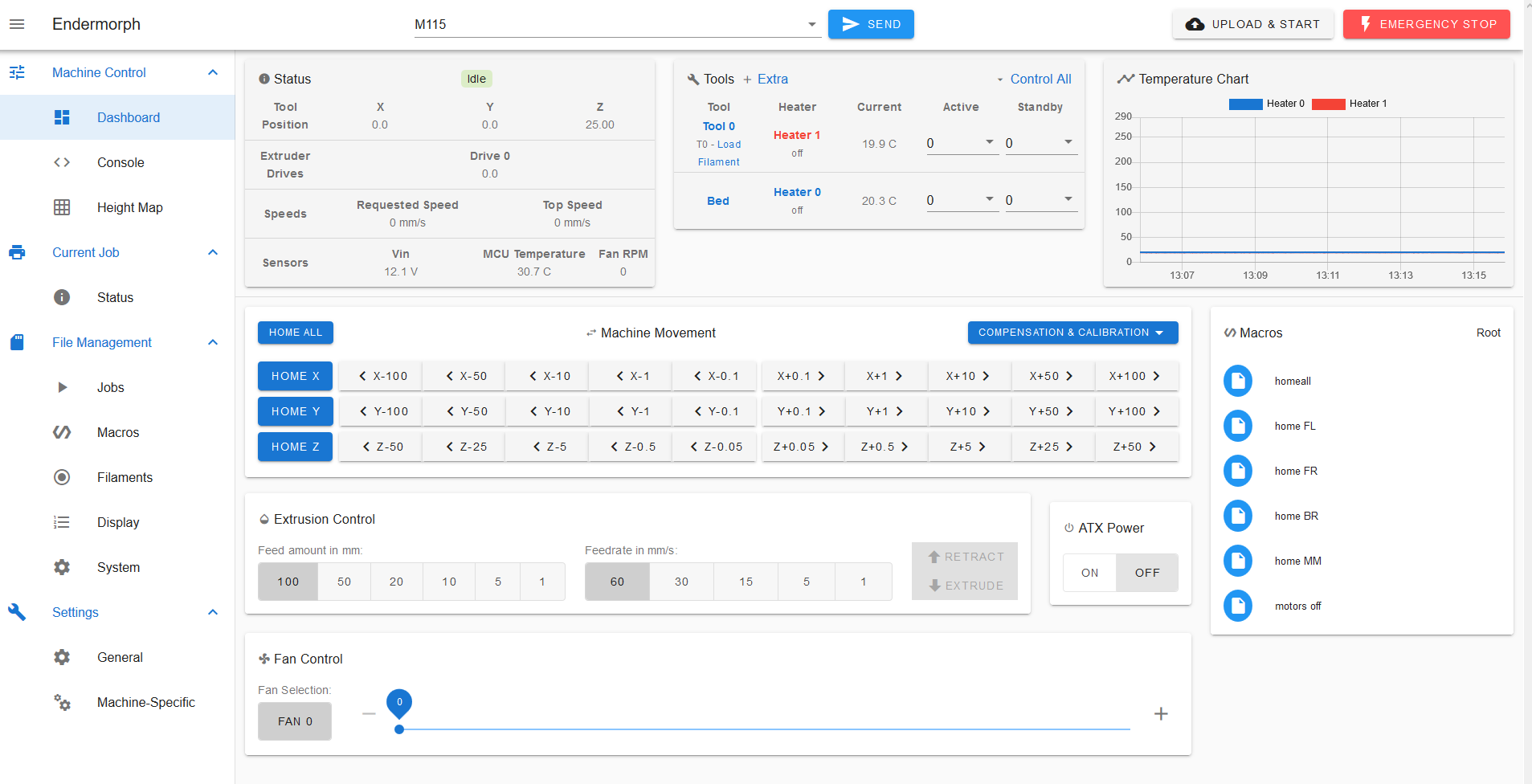
oder sie wird im Webinterface unter Settings/Machine-Specific angezeigt:
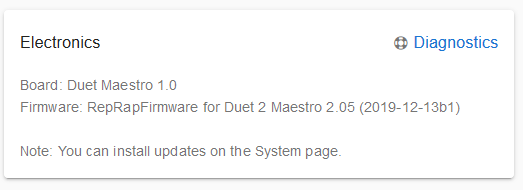 Im Dezember 2019 hat Duet3d auch den Release-Kandidaten der Version 3 bereitgestellt, der auch das Duet 3 unterstützt. Ich bin erstmal bei der letzten finalen Version 2 geblieben.
Im Dezember 2019 hat Duet3d auch den Release-Kandidaten der Version 3 bereitgestellt, der auch das Duet 3 unterstützt. Ich bin erstmal bei der letzten finalen Version 2 geblieben.
2. Webinterface
Ich nutze DuetWebControl von Christian Hammacher, das Duet3d auch ab Werk aufspielt.
 Die Version wird im Webinterface unter Settings/General angezeigt:
Die Version wird im Webinterface unter Settings/General angezeigt:
 3. LCD-Menü
3. LCD-Menü
Man kann den Drucker erstmal nur mit dem Web-Interface in Betrieb setzen und das LCD-System später hinzunehmen.
Duet3d empfiehlt das LCD-Menü von Mudcruzr, das ich auf meine Zwecke angepasst habe. Mehr dazu weiter unten.
Firmware und GUI Update
Das Update der Firmware (1.) und des WebGUIs (2.) ist bei einem aktuellen Board denkbar einfach:
Man lädt sich hier das File Duet2Firmware-2.05.zip herunter, das die neuesten Versionen zu 1. und 2.enthält.
Über das Webinterface im Menü Filemanagment/System kann man es dann mit der Schaltfläche Upload System Files auf das Bord laden. Den Rest macht das Maestro automatisch und aktualisiert die Firmware und das GUI.
Genauer und mit Fallbacks ist’s hier beschrieben.
Konfiguration
Wie im Duet 2 Blog erläutert, wird die RepRap-Firmware über eine Reihe von Files konfiguriert, die komplett aus Gcode bestehen.
Für die Erstellung dieser Files habe ich wieder das Konfigurationstool genutzt. Dabei hilft das Tutorial zum Ender 3 für das Maestro:
Der Konfigurator liefert ein Zip-File mit allen Konfig-Files. Das Zip kann direkt über die Upload-Funktion unter Filemanagement/System auf das Board geladen werden.
Über Filemanagement/System lassen sich auch die einzelnen Konfig-Files direkt auf dem Board editieren.
Einbau
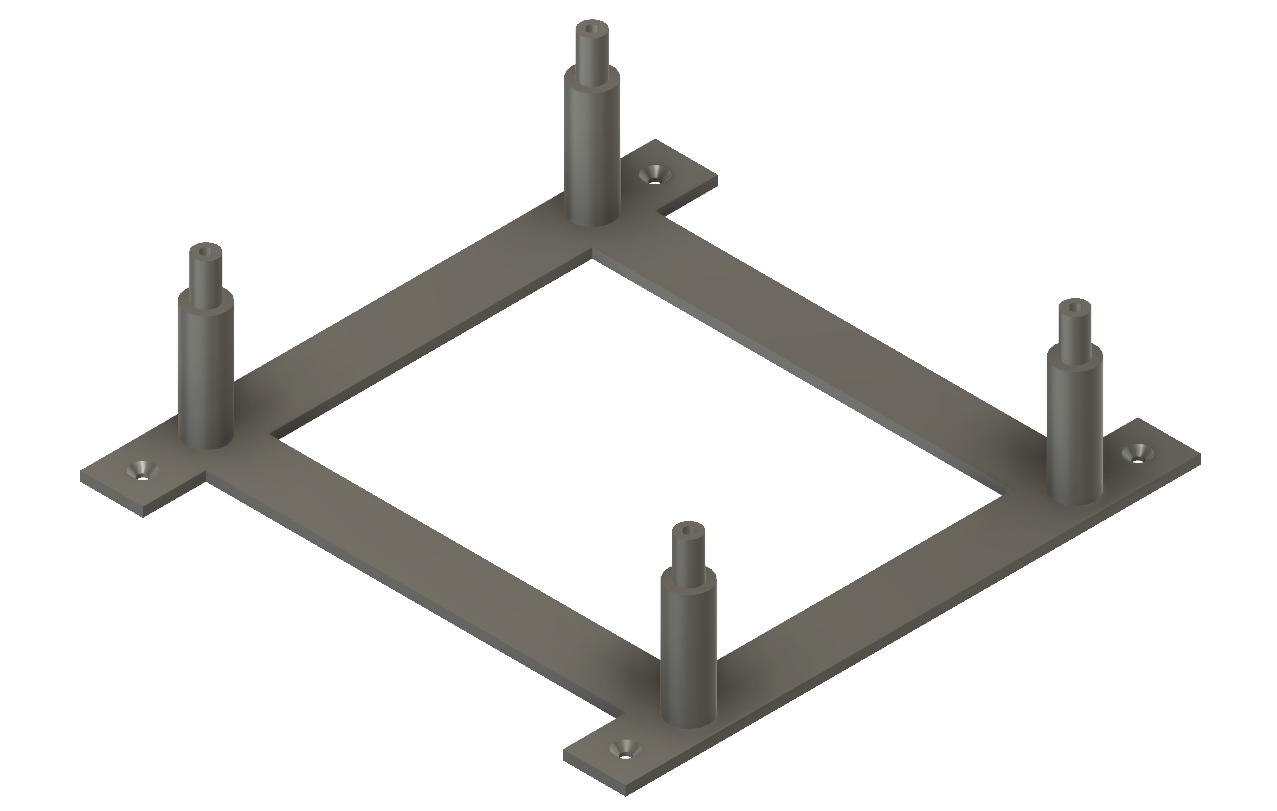
Das Bohrmuster für das Maestro ist das gleiche, wie bei den anderen Duet2-Boards. Da im Endermorph aber schon ein 120mm-Lüfter im Eletronikschacht dreht, reichte ein einfacher Halter für das Board alleine. Es hängt damit im Endermorph über Kopf. Die hohen Säulen sorgen dafür, dass ausreichend Luft über die Rückseite geblasen wird, zumal ich das ohnehin vorhandene Mosfet-Modul für das Heizbett weiterverwende.
Für die Verkabelung nutzt Duet Molex-Stecker (im Bild unten), so dass die bei China-Druckern üblichen JST-XH-Stecker (oben) nicht passen.
 Die JST XH-Stecker habe ich – wie schon fürs Duet 2 Ethernet beim X5S – abgeschnitten und durch die dem Board beigelegten Molex-Stecker ersetzt. Mit meiner Engineer-Zange ging das in de 1.9mm-Postion sehr gut.
Die JST XH-Stecker habe ich – wie schon fürs Duet 2 Ethernet beim X5S – abgeschnitten und durch die dem Board beigelegten Molex-Stecker ersetzt. Mit meiner Engineer-Zange ging das in de 1.9mm-Postion sehr gut.
Das LCD 12864
Nur das Maestro unterstützt die China-Drucker-typischen „Dreh-Klick-Displays“, in meinem Fall den vom Tronxy X5S übrig gebliebenen „RepRapD1scount Spart Controller www.tronxy.com LCD-12864“, im folgenden Bild schon im mit 0.8er Düse schnellgedruckten „Erker“ für den Endermorph, zusammen mit einer Ethernet-Durchführung.

Der Anschluss war mit den originalen Tronxy-Kabeln aus dem X5S problemlos:
Wie im Bild angeschlossen, kommt das schwarze Kabel an den „12864_EXP1“-Anschluss des Maestro, das blaue an den „12864_EXP2“ Anschluss. Das zweite Kabel überträgt nur die Impulse des Dreh-Klick-Schalters.
In der config.g wird das Display mit einem M918-Befehl angemeldet.
M918 P1 E-4 F2000000
Dabei steht P1 für den Display-Typ und E-4 für die Drehrichtung und Pulse des Dreh-Klick-Schalters. F ist die optionale Clock-Rate. Diesen Wert habe ich unverändert gelassen.
E-4 ist die Empfehlung von Duet3d auf meine Frage im Forum hin. Damit ist das Display benutzbar, die Ansteuerung eines Menüpunktes bleibt aber etwas hakelig. Lt. Duet3d liegt das daran, dass der Klickschalter mit einer widersprüchlichen Richtungsinformationen prellt.
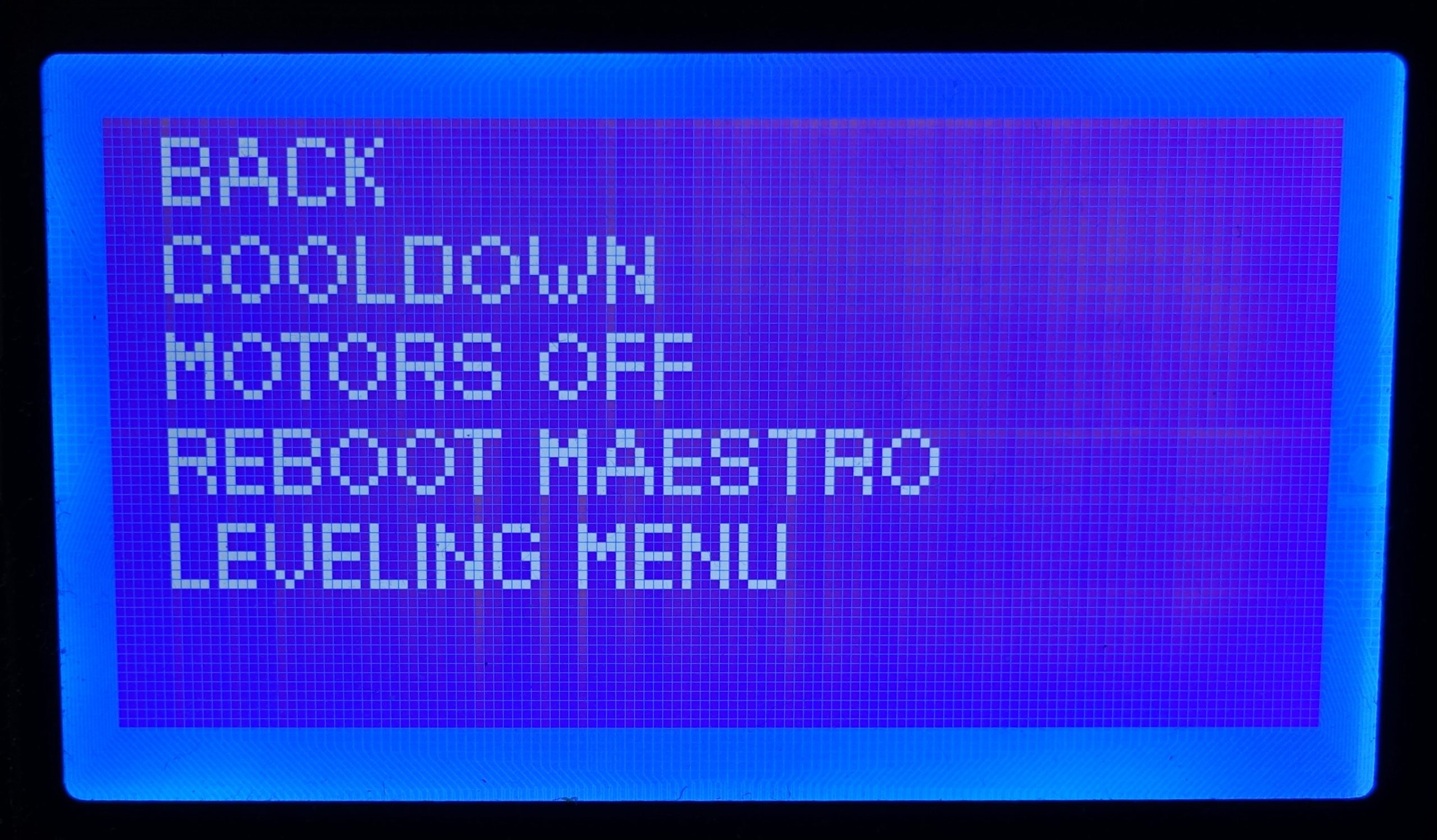
Wie oben schon erwähnt, nutze ich das Menüsystem von Mudcruzr, im folgenden Bild zunächst unverändert:
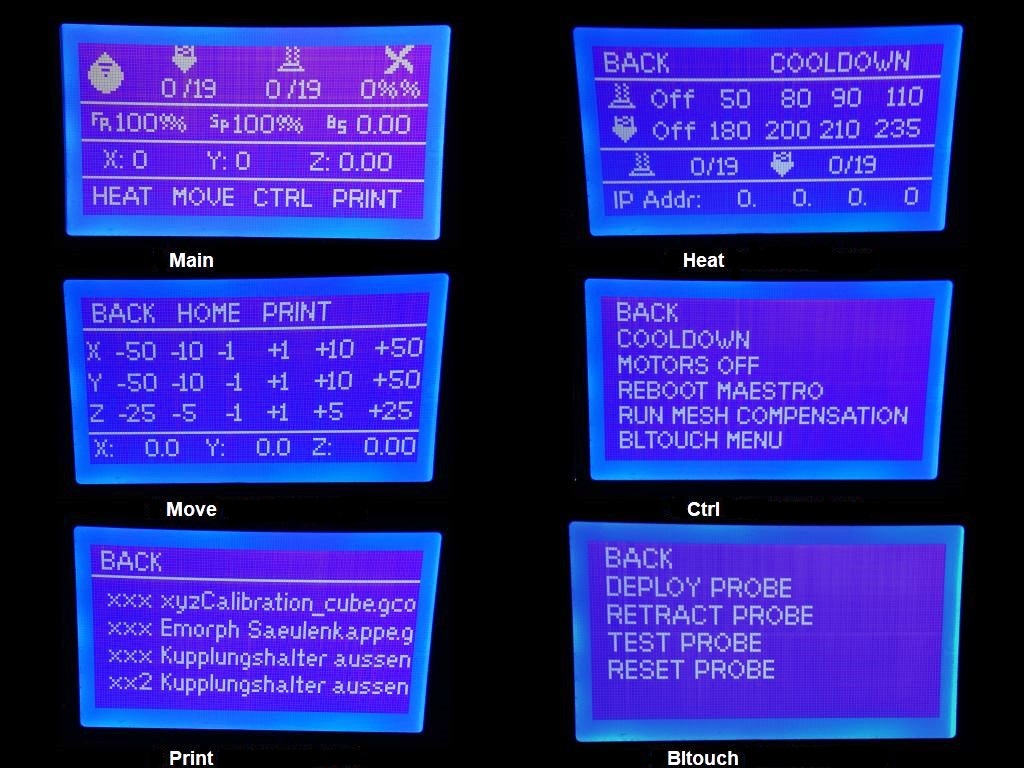 Ausgehend davon habe ich die im Endermorph nicht vorhandenen Menüs gelöscht und statt dessen ein „Leveling“-Menu eingefügt, das mir erlaubt, Leveling-Positionen jeweils genau auf den im Dreieck angeordneten Stellschrauben des Ender-2-Druckbetts anzusteuern.
Ausgehend davon habe ich die im Endermorph nicht vorhandenen Menüs gelöscht und statt dessen ein „Leveling“-Menu eingefügt, das mir erlaubt, Leveling-Positionen jeweils genau auf den im Dreieck angeordneten Stellschrauben des Ender-2-Druckbetts anzusteuern.
Das File für das CTRL-Menu sieht danach so aus:
button R0 C5 F0 T"BACK " A"return" ;image R11 C5 L"hline.img" button R10 C5 T"COOLDOWN" A"M98 P#0" L"/menu/cooldown" button R20 C5 T"MOTORS OFF" A"M18" button R30 C5 T"REBOOT MAESTRO" A"M999" button R40 C5 T"LEVELING MENU" A"menu level"
Das File für das Level-Menu so:
button R0 C5 F0 T"BACK " A"return" button R10 C5 T"HOME ALL" A"M98 P#0" L"/macros/1_homeall" button R20 C5 T"FRONT LEFT" A"M98 P#0" L"/macros/2_home FL" button R30 C5 T"FRONT RIGHT" A"M98 P#0" L"/macros/3_home FR" button R40 C5 T"BACK RIGHT" A"M98 P#0" L"/macros/4_home BR" button R50 C5 T"MID" A"M98 P#0" L"/macros/5_home MM"
 Jeder Menüpunkt ruft ein Makro auf.
Jeder Menüpunkt ruft ein Makro auf.
Hier als Beispiel das File des 2_HOME FL-Makros:
; home FL – makro ; Leveling Position front left ; always call Homeall first! ; ; Peter O, 23.12.2019 ; G90 ; absolute positioning G1 H0 Z5 F4800 G1 H0 X20 Y60 F4800 G1 H0 Z0 F1800
Die Makro-Files werden über das Web-Interface unter Filemanagement/Makros aufs Board geladen.
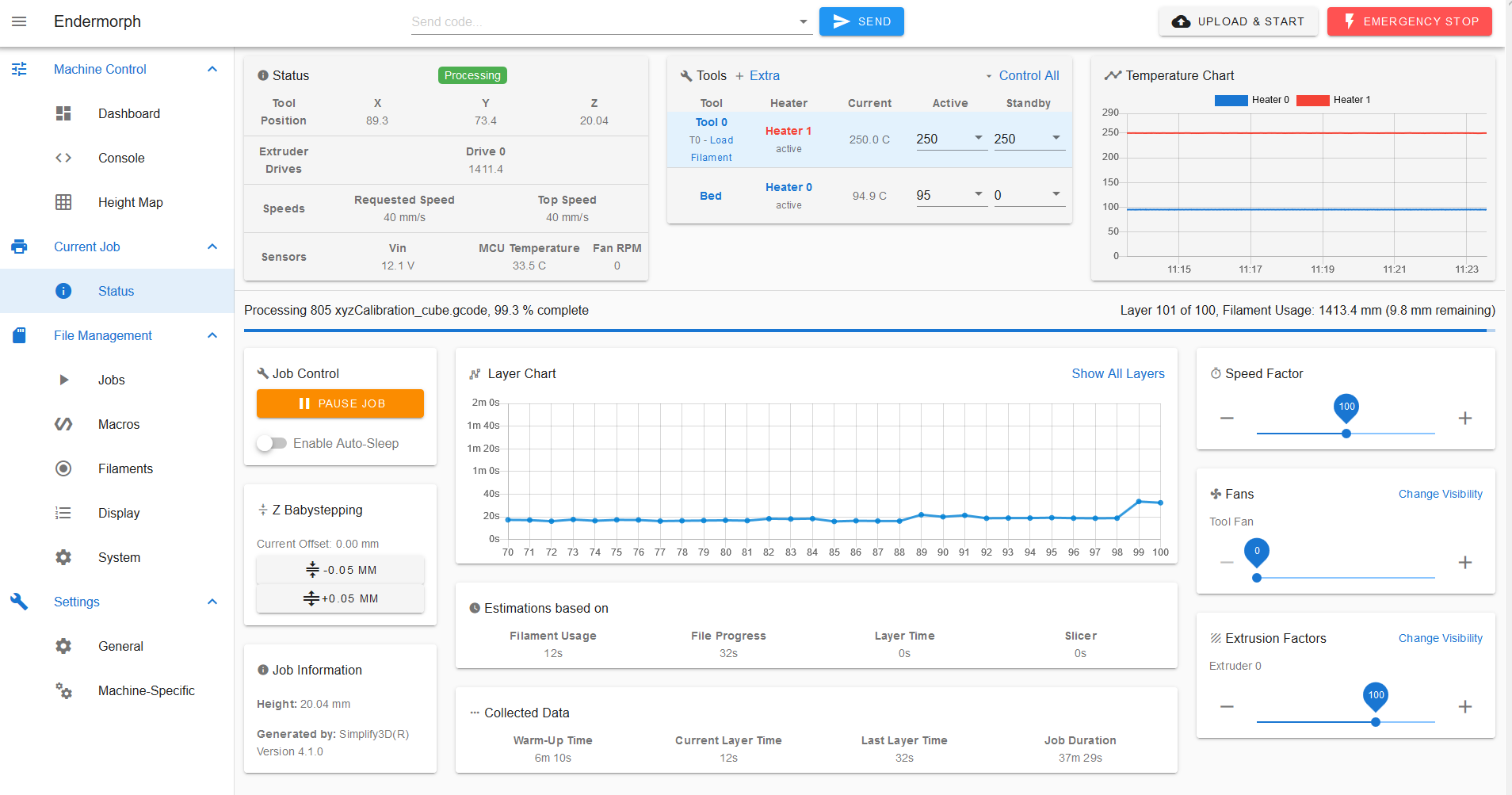
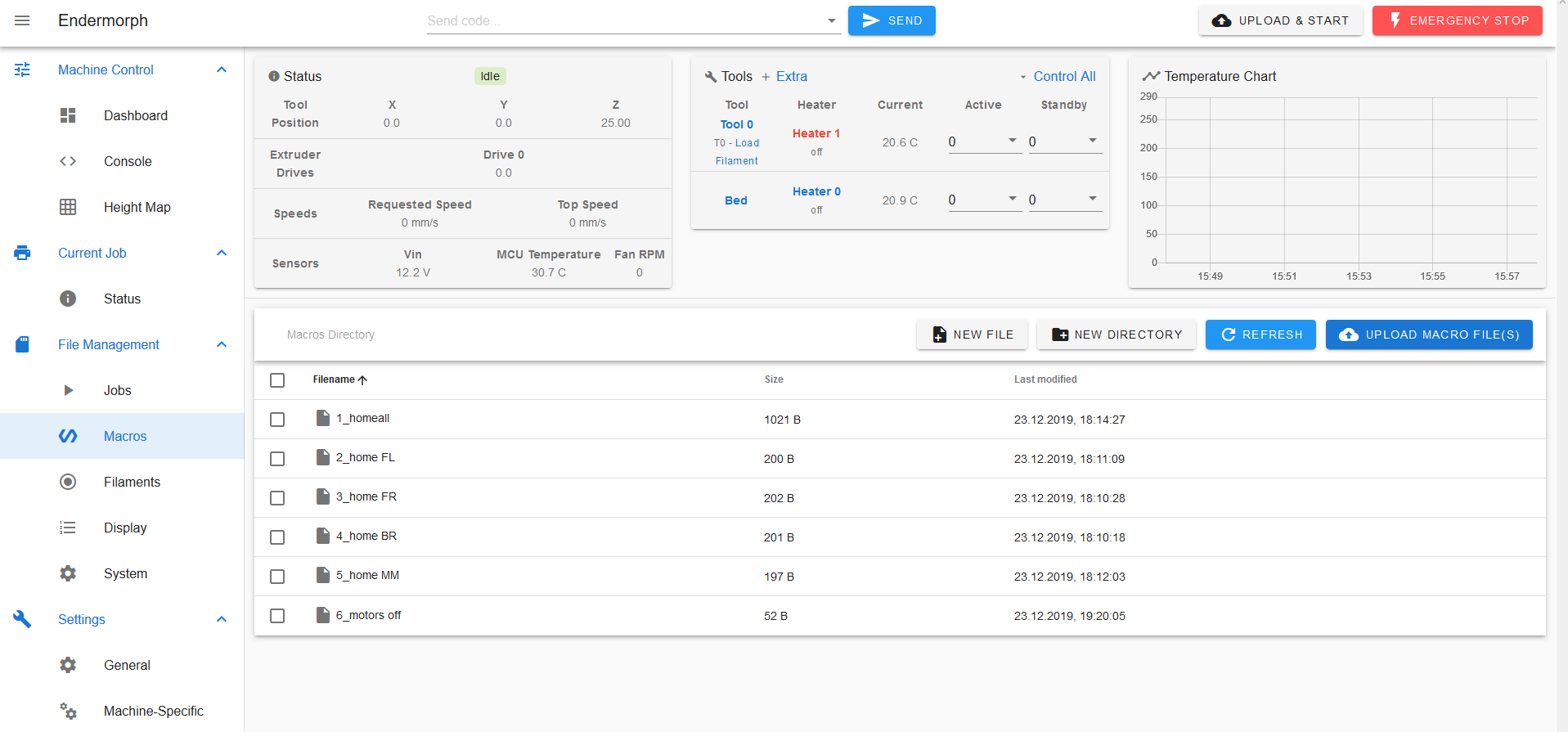 Sie sind dann auch über das Dashboard des WebGuis erreichbar. Die Numerierung „1_“, „2_“ wird dort bei der Beschriftung weggelassen und gibt die Darstellungs-Reihenfolge rechts im Dashboard vor:
Sie sind dann auch über das Dashboard des WebGuis erreichbar. Die Numerierung „1_“, „2_“ wird dort bei der Beschriftung weggelassen und gibt die Darstellungs-Reihenfolge rechts im Dashboard vor:
 Angesteuert über das LCD12864 sieht das Leveling dann so aus:
Angesteuert über das LCD12864 sieht das Leveling dann so aus:
Was bringt’s?
Das Maestro im Endermorph ist ein großer Gewinn.
Alleine der Webzugriff und die Möglichkeit, alle Parameter, auch die Motortreiber-Betriebsarten oder Motorströme, über Gcodes in Druckdateien, Scripts, Makros, oder die Kommandozeile im Webinterface absetzen zu können, ist ein großer Gewinn.
Die Drucke sind in der Qualität auf keinen Fall schlechter als vorher, und der Drucker ist ein ganzes Stück leiser, als mit dem originalen Creality-Board, wenn auch nicht ganz so leise, wie das Duet 2 Ethernet im X5PO.
Das Maestro erzeugt auf den Motoren auch im Stand flirrende und zwitschernde Geräusche, deren Ursache ich noch nicht ergründet habe. Vielleicht wird das Board vom in der Nähe montierten zweiten Arduino gestört, der die Gehäusetemperatur des Endermorph steuert und überwacht. Aber das ist ein anderes Thema. Für den Moment habe ich ein Makro „Motors off“. Damit ist im Stand dann erst einmal Ruhe.
Mein Gesamtfazit: Wer kein RepRap-Display braucht und nicht auf den Euro achten muss, kauft sich ein Duet 2 Wifi oder Ethernet. Für die anderen ist das Mastro mehr als interessant.