
Elegoo Neptune 3
Mal wieder ein Ender 3 Klon. Von Elegoo, hatten wir auch schonmal. Diesmal nennt er sich Neptune 3.
Schauen wir mal, was er so zu bieten hat…
Der Drucker wurde uns freundlicherweise direkt von Elegoo aus Anlass des Presales zur Markteinführung kostenlos zur Verfügung gestellt, weitere Absprachen gab es nicht.
Weil wir wohl noch nicht genug Ender 3 irgendwas Klone hatten, hier also noch einer, da es ja anscheinend immer noch einen Markt dafür gibt. OK, die Einsteiger, meinetwegen.
Technische Daten lt. Elegoo, zusammengesucht und übersetzt von mir:
Bauraum: 220*220*280 mm^3
Maximale Düsen-Temperatur: 240 °C
Maximale Bett-Temperatur: 100 °C
Bauplattform: magnetische Flexplate mit rauher PEI-Beschichtung
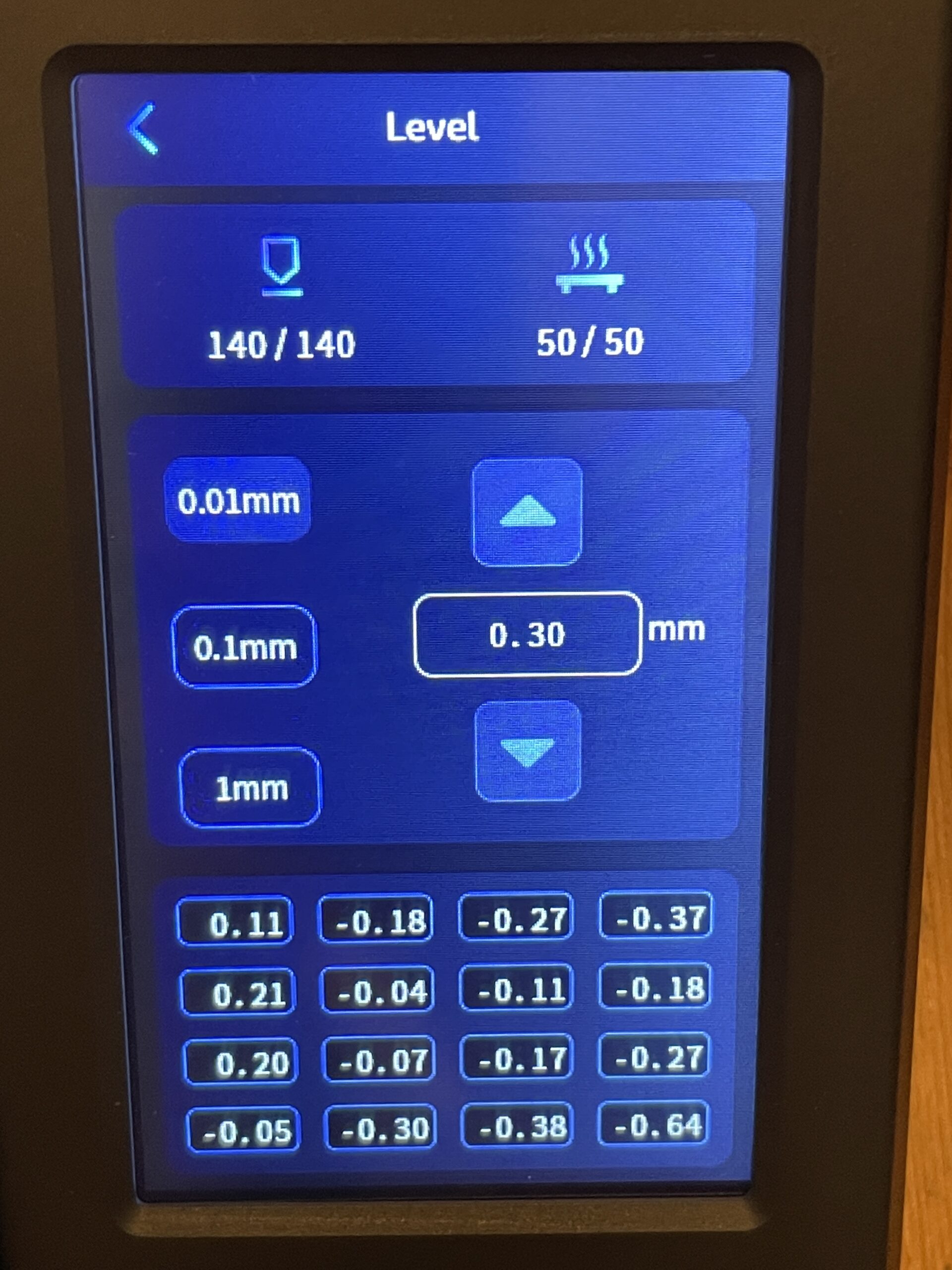
16-Punkt Autoleveling über Drucksensor am Kopf
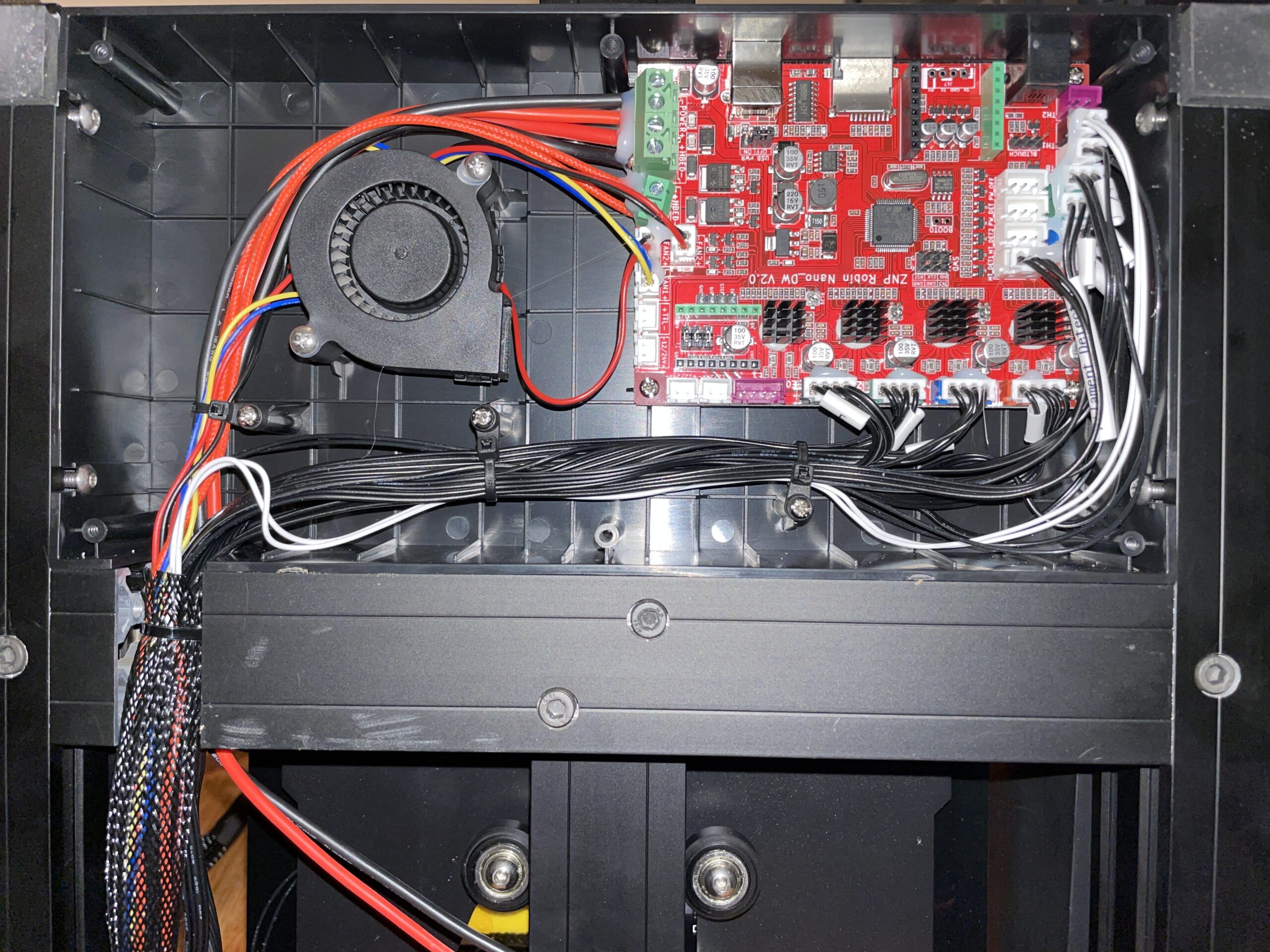
Leise Steppertreiber: XYZ: TMC-2225, E: TMC-2209
Bowden-Extruder: Dual Gear, Andruck einstellbar
Heatbreak: Titan-Verbindung
POM-V-Slot-Rollen für die Laufwägen der Achsen
Große Rändelschrauben zum Spannen der X- und Y-Riemen
Handgriff zum Transportieren
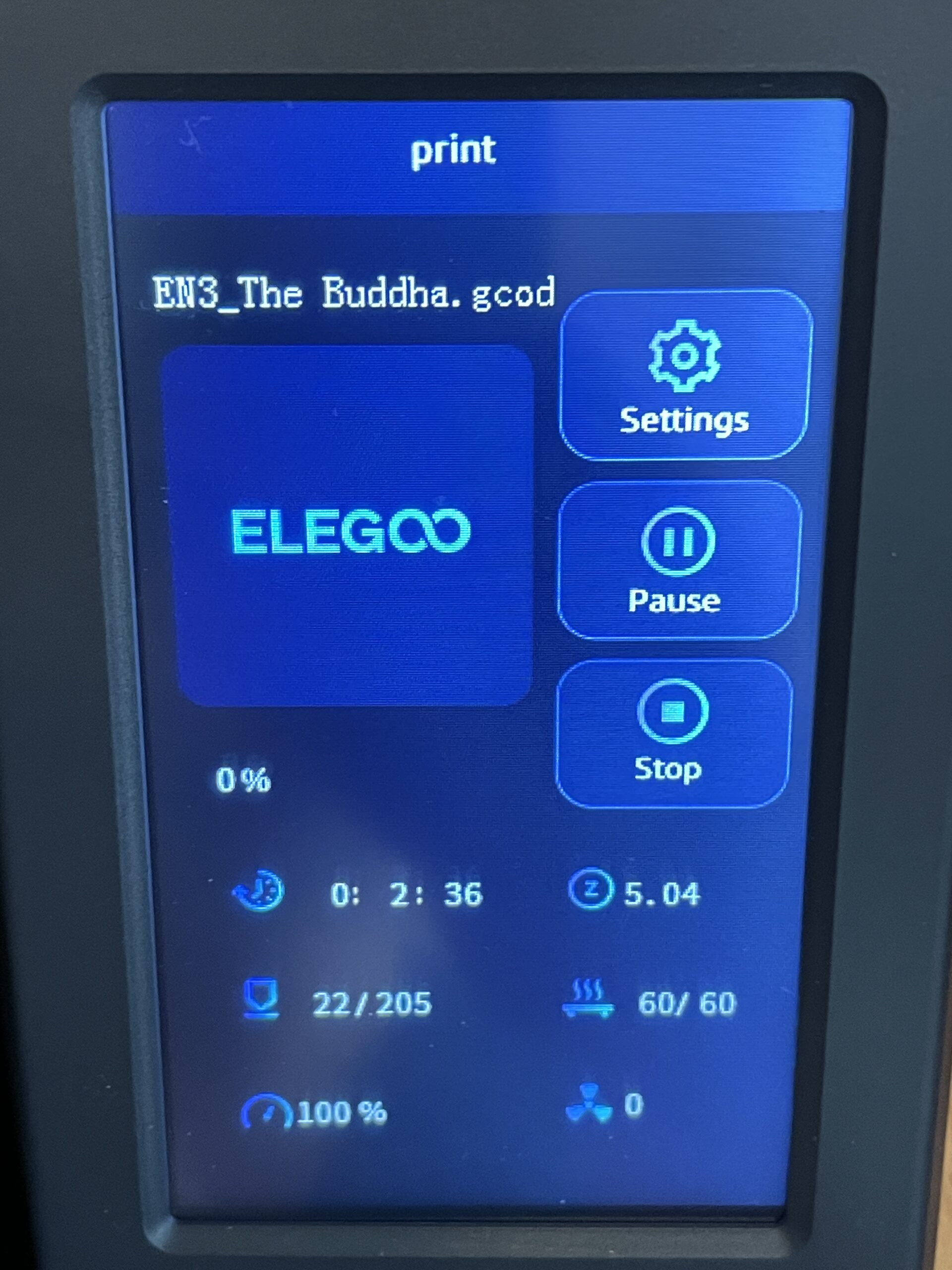
Abnehmbarer 4,3″ Touchscreen
Bauteilkühlung mit zwei Lüftern
Druckwiederaufnahme nach Stromausfall
Filamentsensor
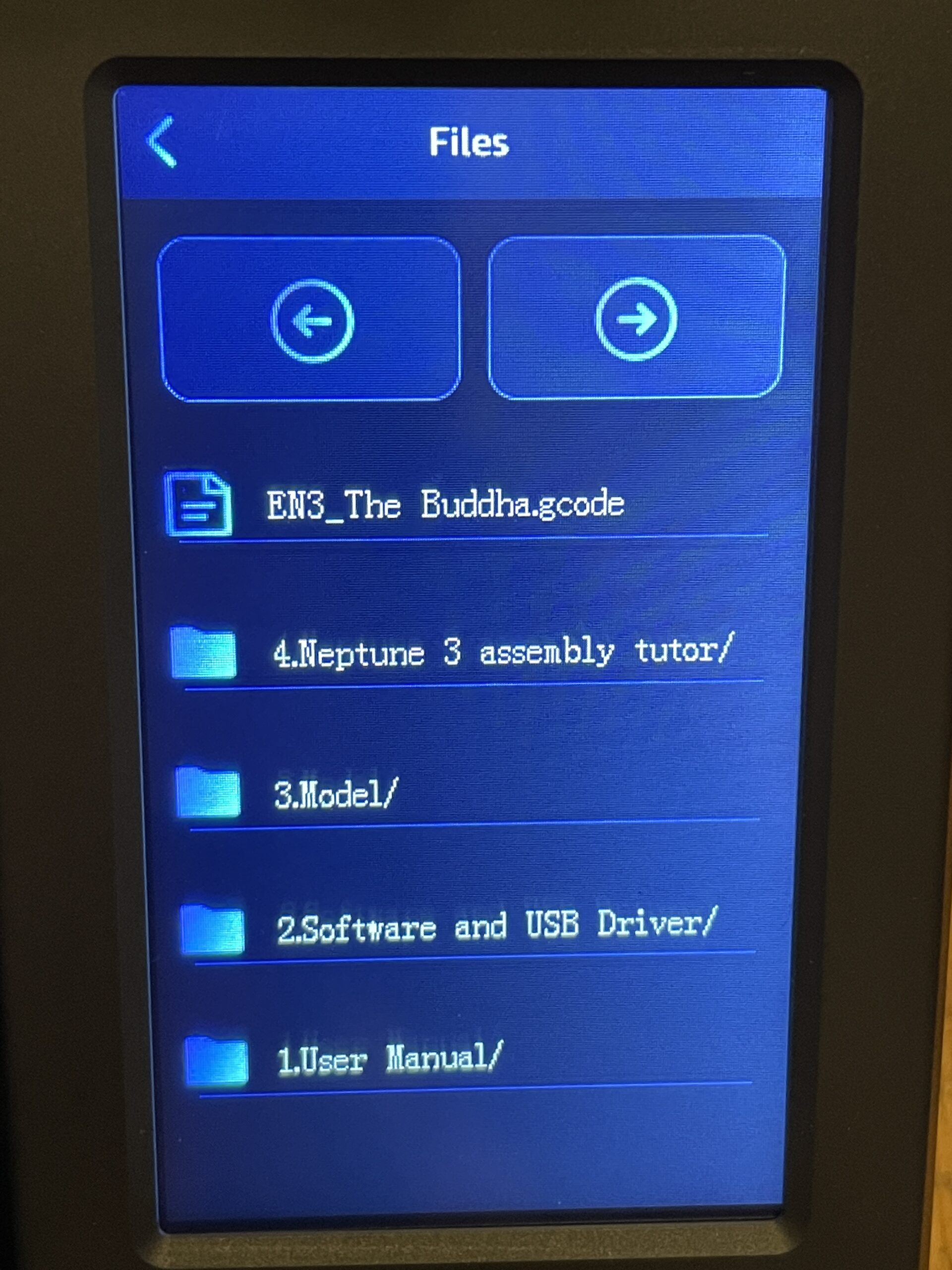
Datenquelle: gCode-Dateien von µSD-Karte, nur für Fortgeschrittene per USB-Kabel
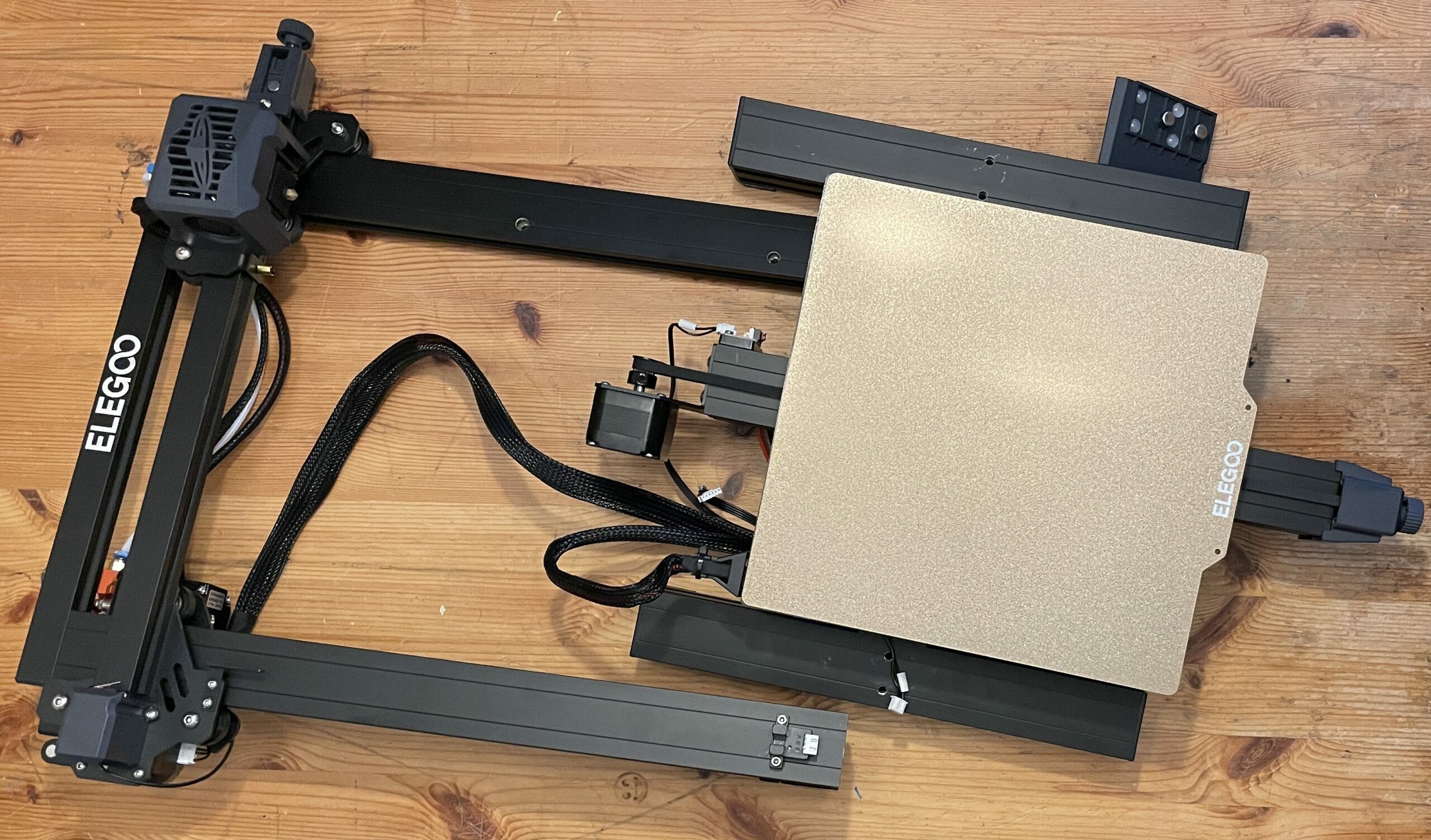
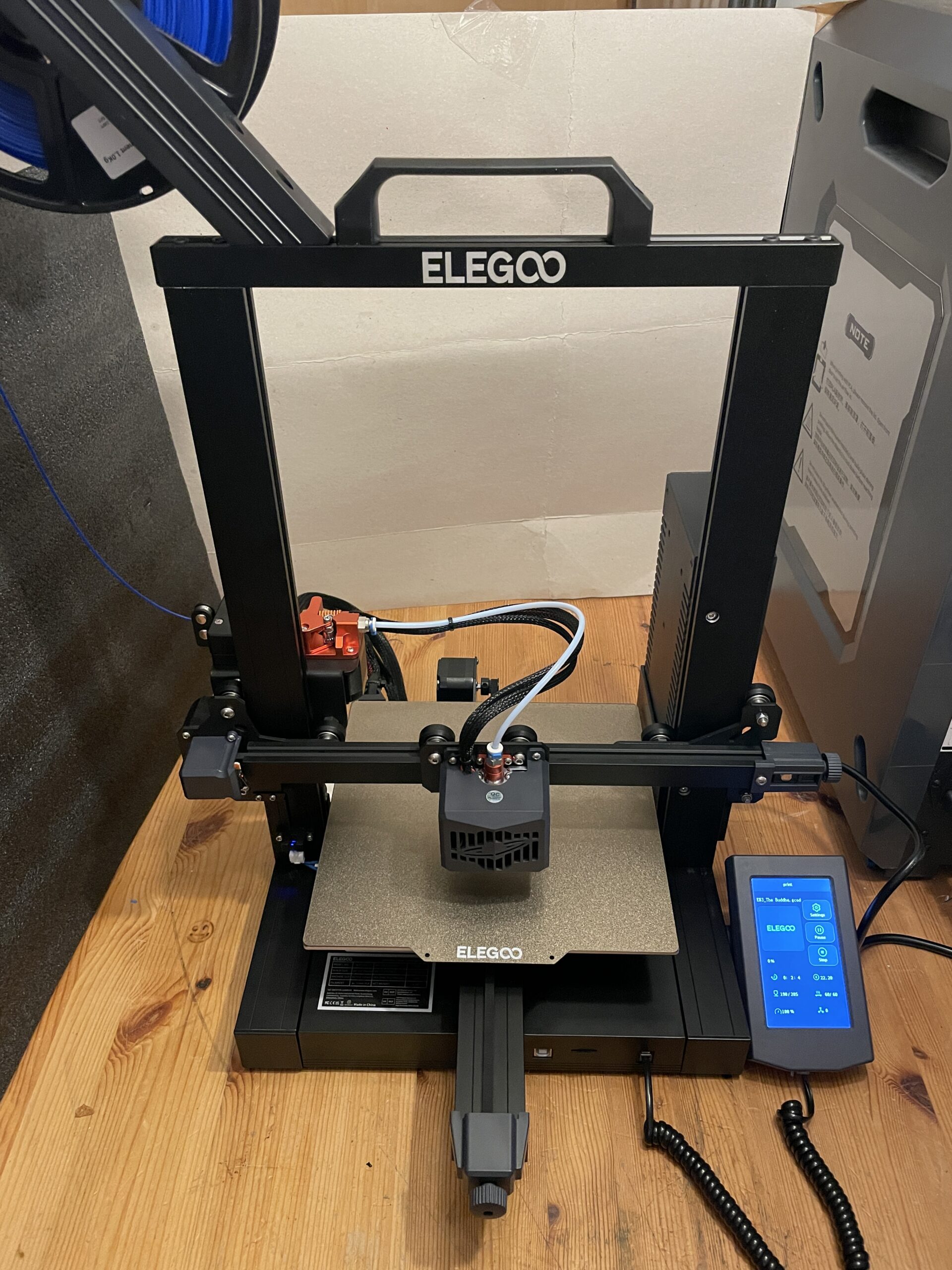
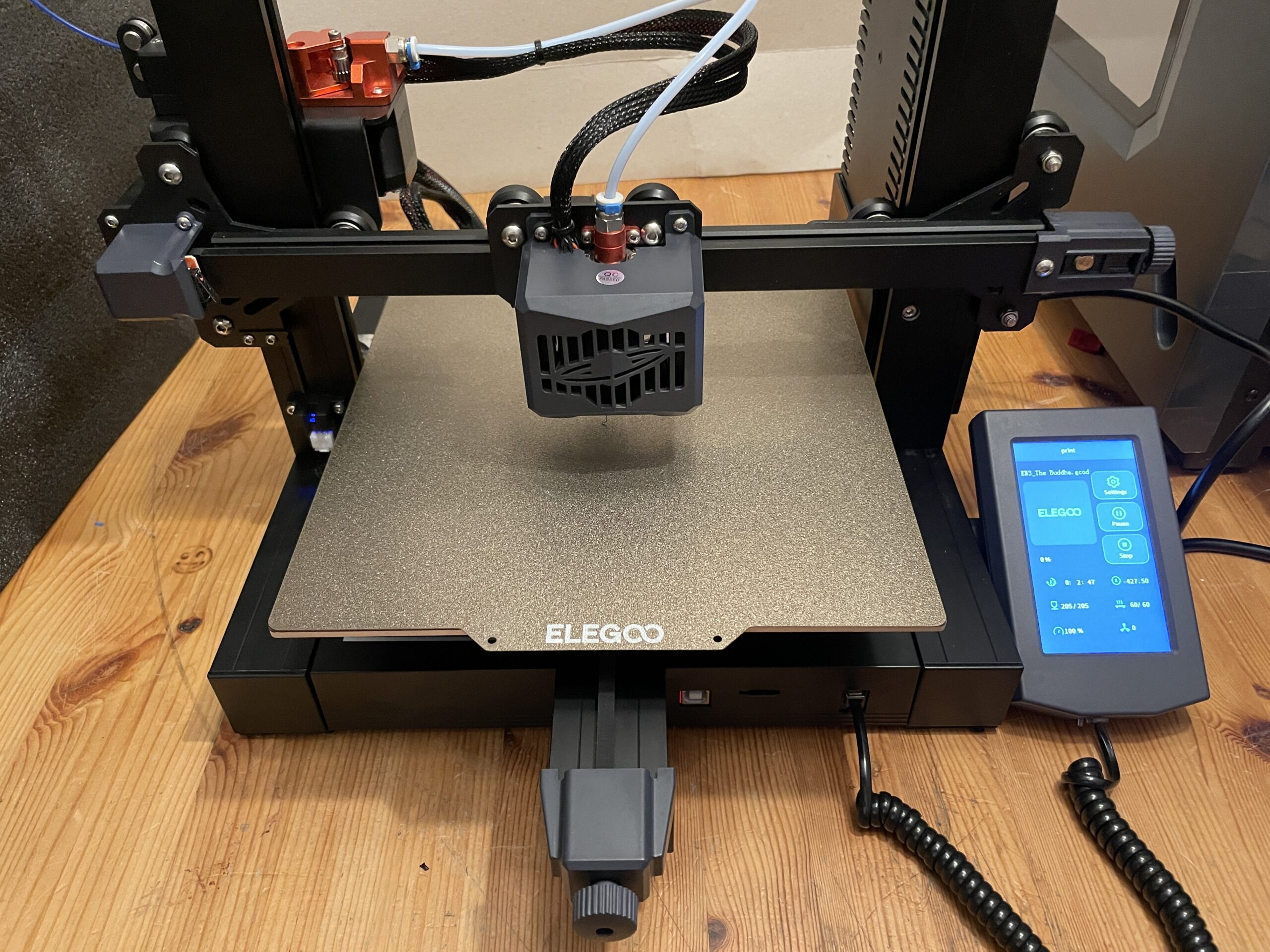
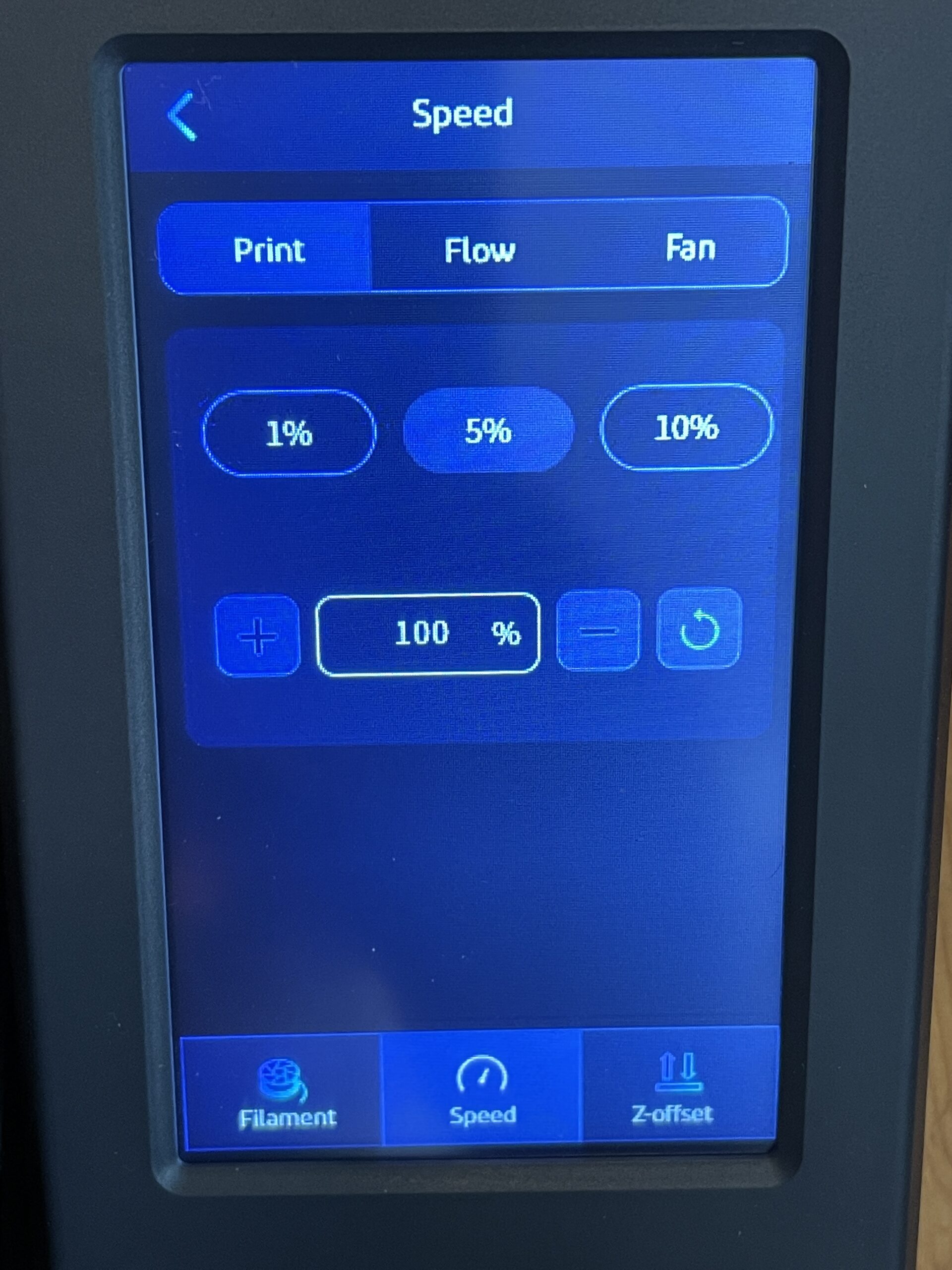
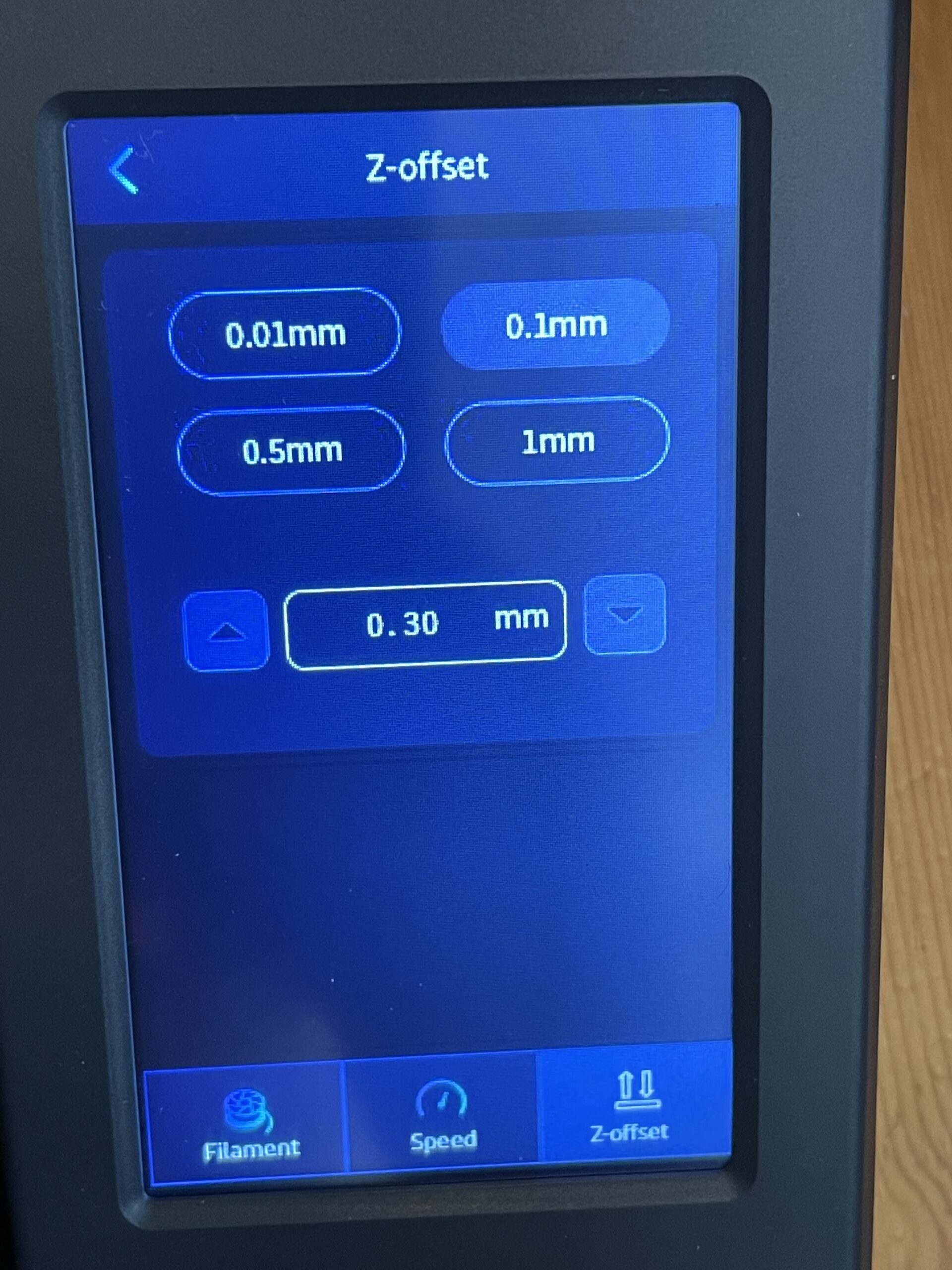
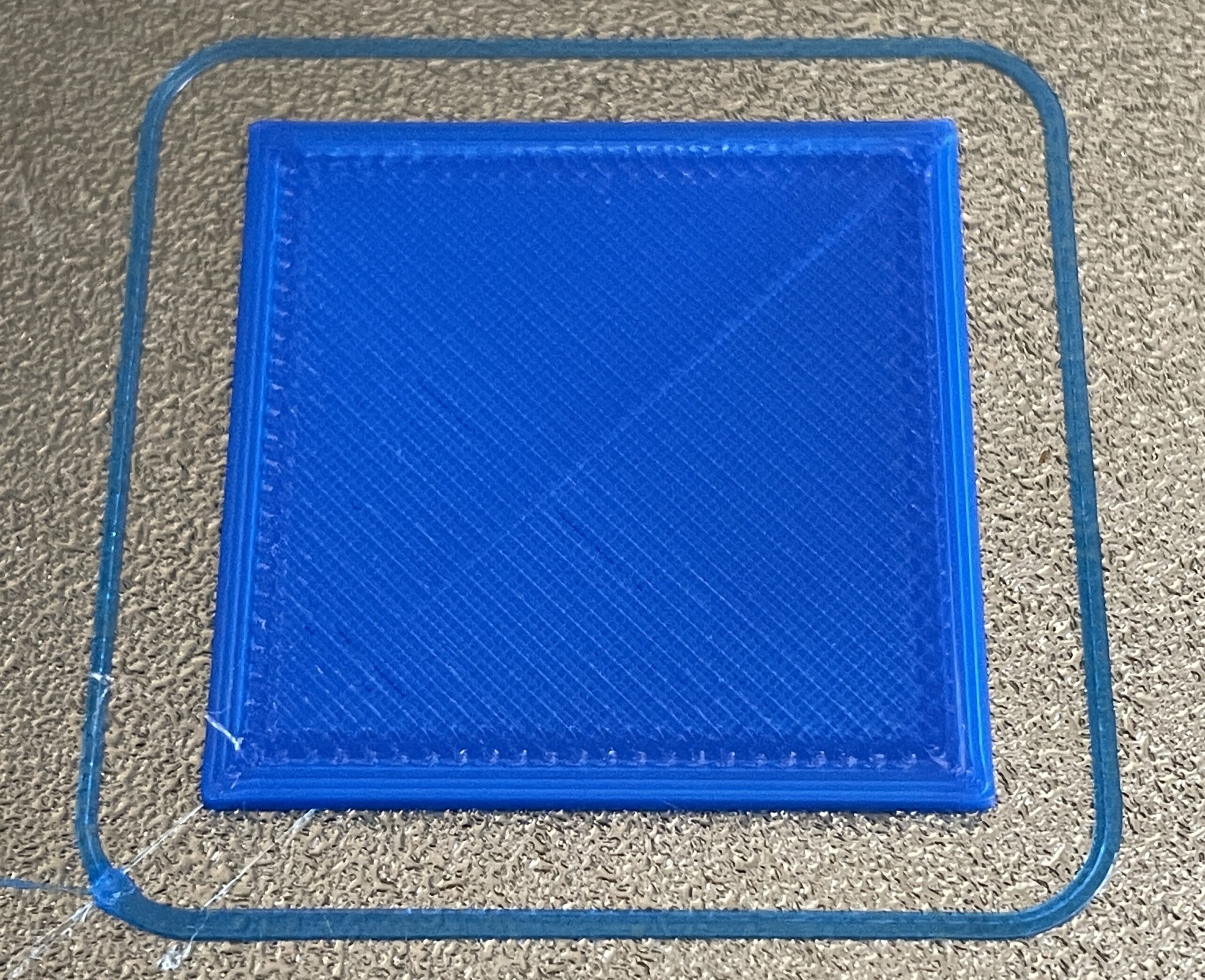
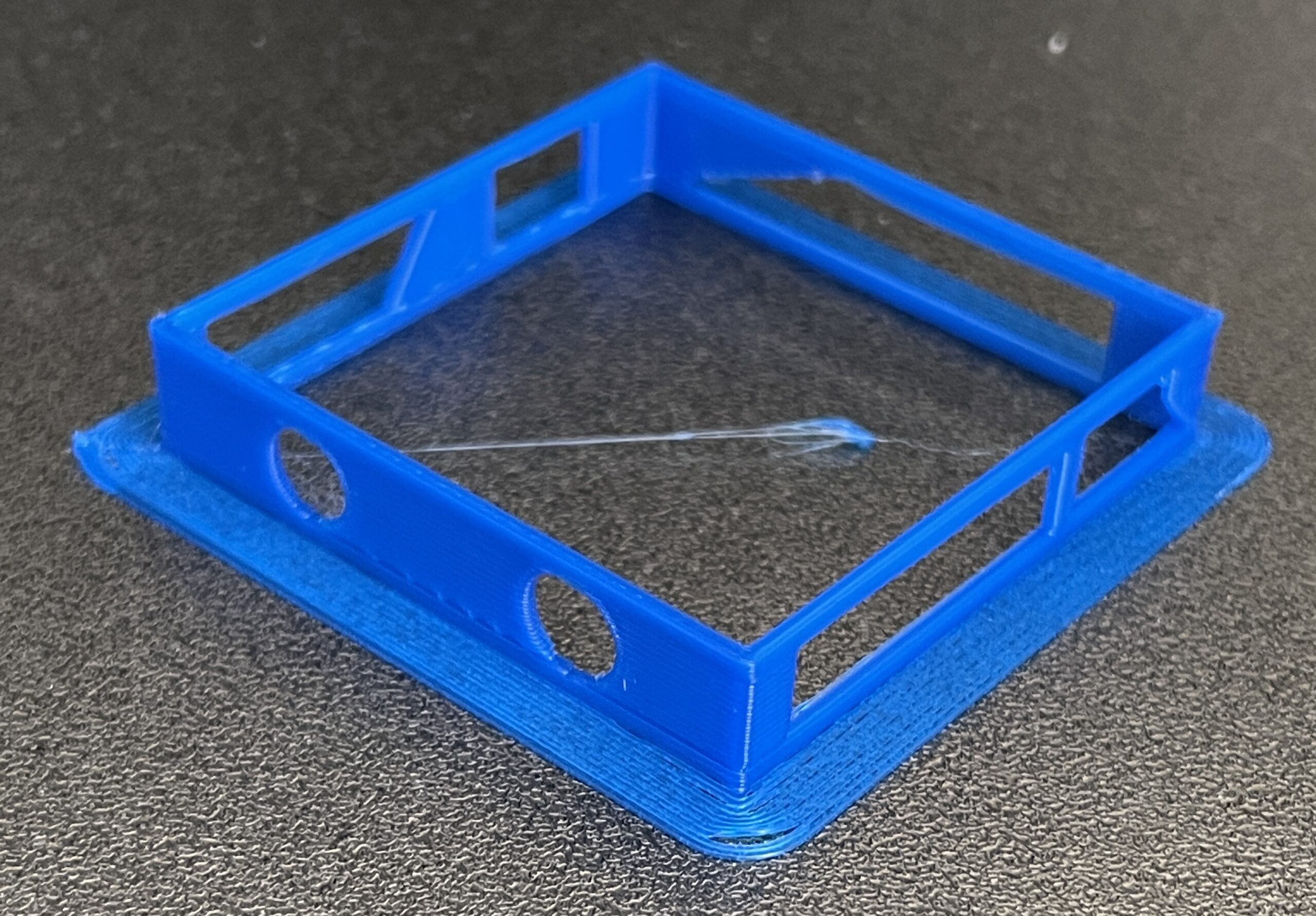
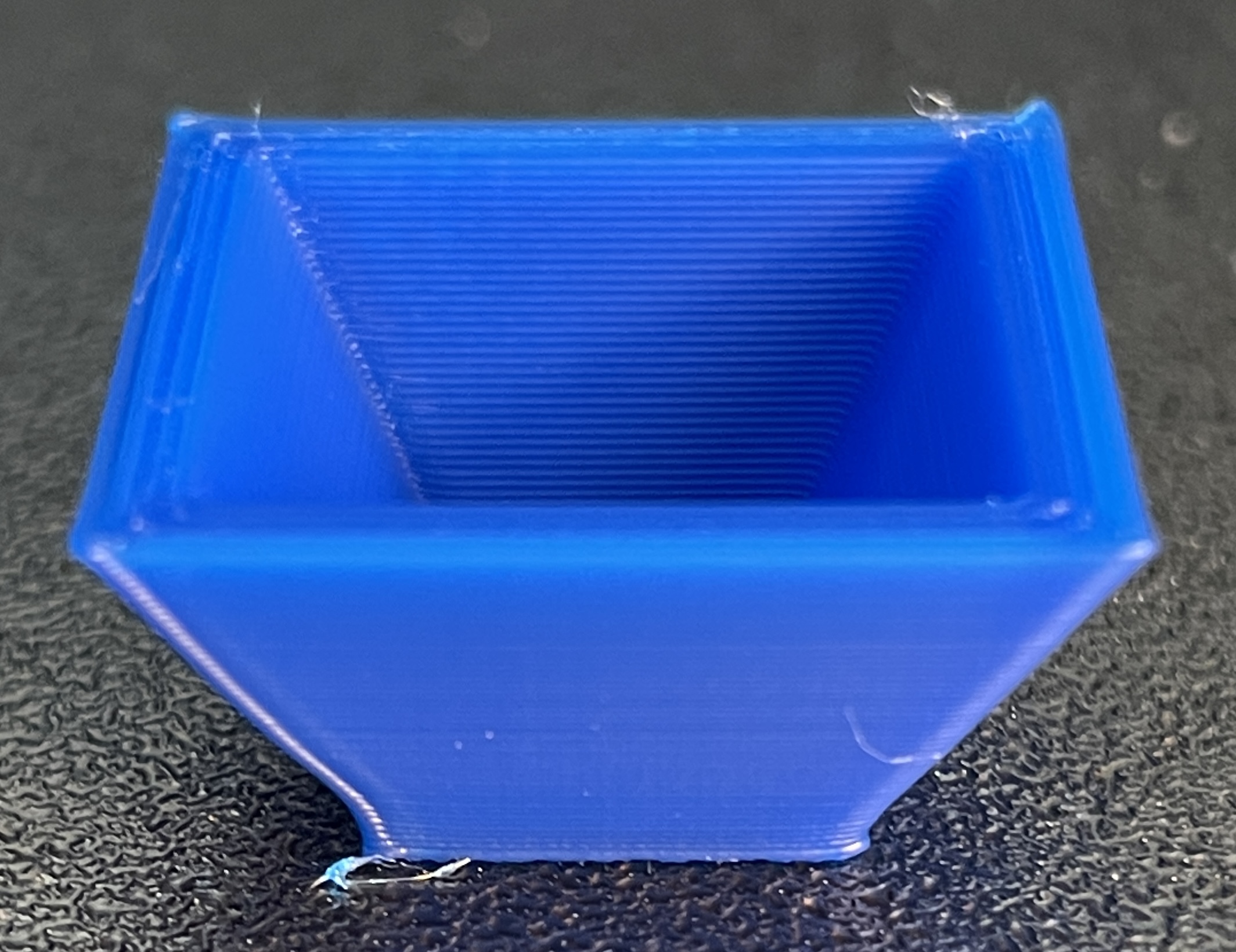
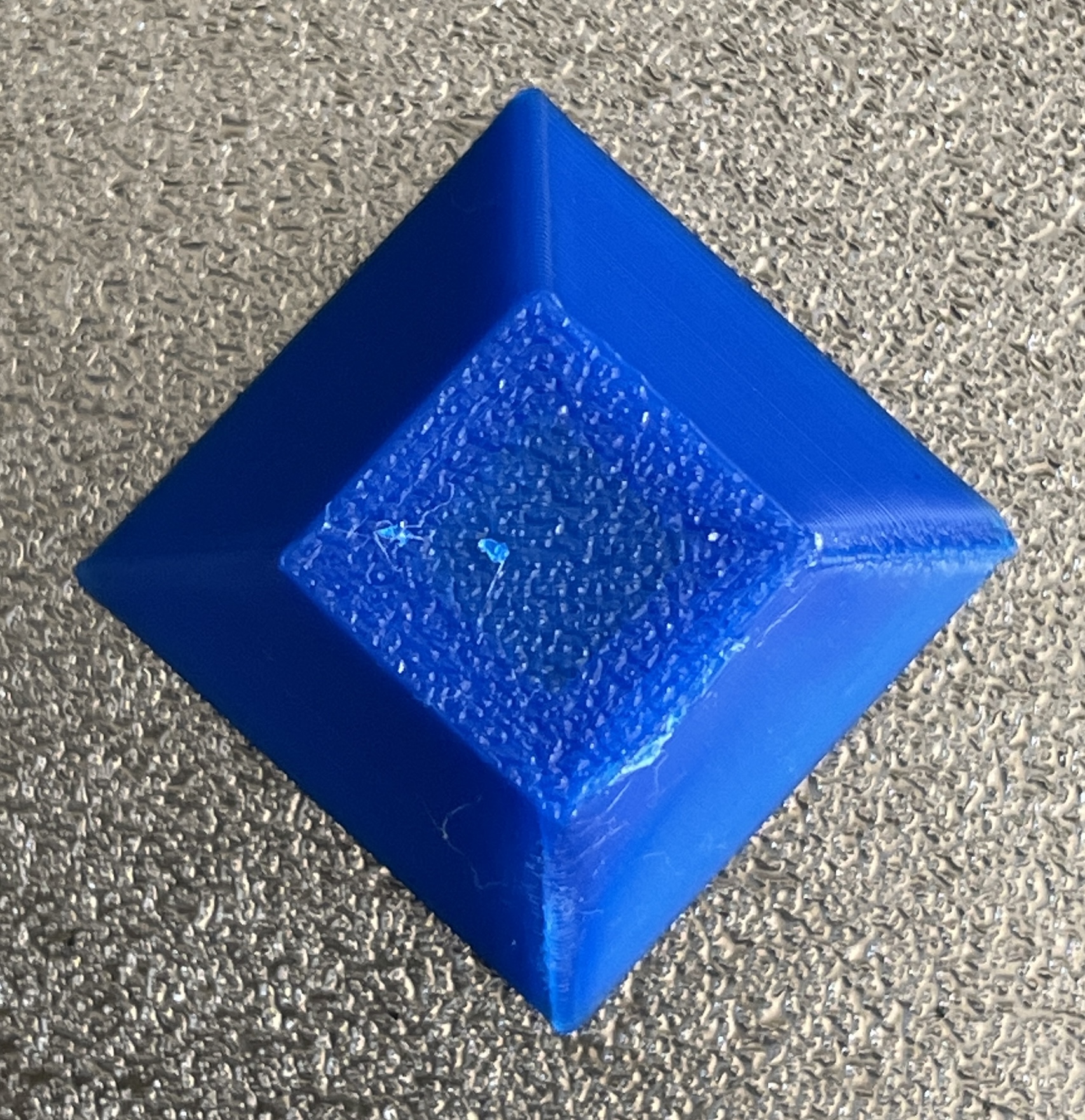
Zum Ablauf der Inbetriebnahme und von den Drucktests hier eine ganze Menge Bilder mit etwas erklärendem Text dazu:

















Wie macht sich nun dieser x-te Aufguss eines Ender-3 … Klons?
Wirklich hervorragend und somit nochmals deutlich besser als der von mir vor über einem Jahr hier getestete und für gut befundene Vorgänger, der Elegoo Neptune 2.
Besser ist er, weil er folgendes hat: eine PEI-beschichtete Flexplate statt einer FakeTak Folie auf einer FR4-Platte, einen metallenen Dual-Drive Extruder statt eines Plastik-Mk8, einen viel sinnvoller nutzbaren Touchscreen und ein neueres Board mit leisen Treibern für alle Steppermotoren.
Ich finde den Neptune 3 sogar besser als den hier getesteten Anycubic Mega SE, der mir vor ein paar Monaten sehr gut gefallen hat. Letzterer hat ein arg minimalistisches Mainboard und die altbewährte Ultrabase hat keine Chance gegen eine PEI-Flexplate.
Auch wenn das Auto-Leveling für’s Bett sofort funktioniert hat – ich brauche es nicht. Besonders nicht wenn man wie hier das Bett nicht über Schrauben waagrecht ausrichten kann, sondern per Mesh nicht nur dessen Unebenheiten sondern ggf. auch die Schieflage ausgleichen muss. Dadurch wird der Boden des Druckobjektes dann aber nicht rechtwinklig zur Senkrechten!
Eine Besonderheit gibt es hierbei, die vielleicht nur mir als Nichtbenutzer von ABL aufgefallen ist: der Drucker führt nach G28 automatisch ein Nullen von Z mit dem Sensor aus. Daher sollte die Düse vorher aufgeheizt sein, damit keine Filamentreste zwischen Düse und Bett die Messung verfälschen können. Das führt sonst nämlich dazu, daß die erste Schicht nicht auf dem Bett hält.
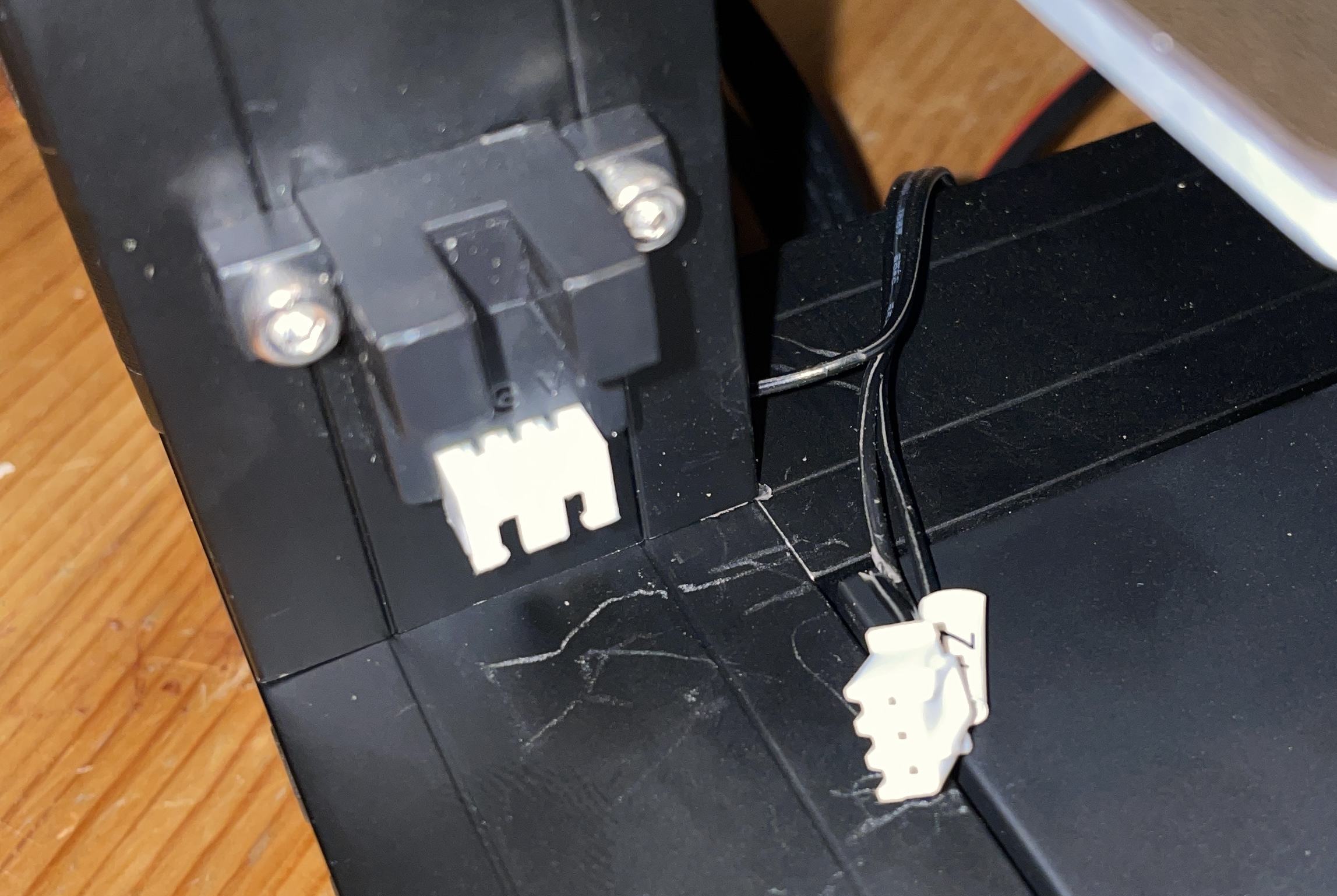
Ich hatte beim Aufbau und Test keine ernsthaften Probleme, außer dem von mir aus grober Unachtsamkeit eingeklemmten Kabels des Z-Endschalters.
Die von Elegoo beworbenen 10 Minuten Aufbauzeit sind etwas knapp kalkuliert, es dauert eher an die 30, da es eine Fummelei ist, die vier Schrauben von unten durch den Hauptrahmen in die Z-Profile zu schrauben. Es gibt keinerlei Kanten oder Vertiefungen, die einem helfen würden die Position für die 4020er Z-Profile zu finden. Und die Basis muss dabei flach auf dem Tisch liegen und über dessen Kante hinausstehen, weil es auf der Seite liegend erst recht nicht funktioniert, da die Achsen prinzipbedingt weit über die Basis hinausstehen.
Aber trotzdem sind die vier vormontierten Teile viel besser als alles erstmal selbst zusammenbauen zu müssen. Schade, daß das Netzteil auch hier nicht zur Stabilisierung der Z-Achse verwendet wird, man kann es leider auch deswegen nicht an den unteren Rahmen anschrauben, weil das zur Elektronik gehende Stromkabel unten herauskommt.
Die Spannung der Riemen von X- und Y-Achse muss man unbedingt kontrollieren, auch wenn man bei X kaum rankommt, um am Riemen zu zupfen. Die Rändelschrauben können sich beim Transport oder Auspacken gelöst haben!
Die Exzenter an den Laufwägen waren alle sauber eingestellt, sodaß diese leicht laufen ohne zu locker zu sein.
Apropos Netzteil: 360W 24V „NoName“, der Einschalter ist leider mal wieder verkehrt herum eingebaut: die Aus-Position ist oben, gehört aus Sicherheitsgründen aber nach unten. Der Netzteillüfter bläst nach außen, was ich sinnvoller finde zur Wärmeabfuhr als andersrum wie sonst oft realisiert.
Die Lüfter sind relativ leise, sie scheppern und quietschen nicht, ich hatte schon deutlich lautere. Und der am Hotend schaltet sich netterweise erst ab 50 °C Düsentemperatur ein, das ist leider nicht selbstverständlich (Gell, Creality…).
Die 5 m weißes PLA-Filament sind jedoch einfach nur lächerlich, mehr als einmal den Buddha bekommt man da nicht raus. Aber es gibt ja oft Bundles mit Filament das dann meist in einem extra Paket ankommt…
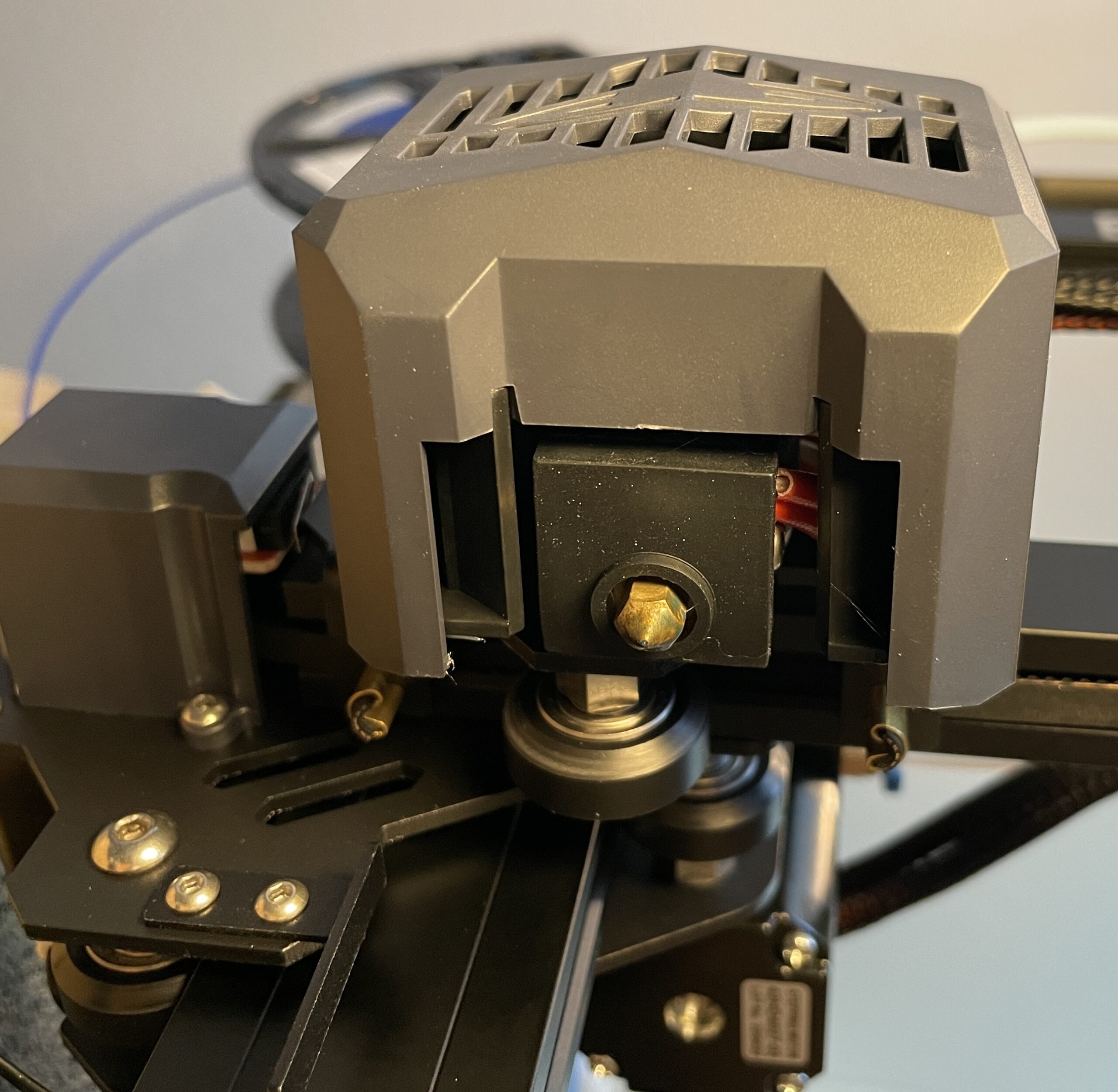
Das Hotend ist ein unspektakulärer Mk10 Klon mit Mk8 Düse aber netterweise zwei Bauteillüftern, damit Überhänge besser gelingen. Und mit Silikonsocke, damit das Hotend nicht loses Filament aufsammelt und im ungünstigsten Moment wieder abgibt. Ich habe den Kopf jetzt nicht extra zerlegt um das Titan-Heatbreak zu finden, das die Gefahr des Verstopfens verringern soll.
Das Fortsetzen des Drucks nach Stromausfall habe ich nicht getestet, ohne zusätzliches Haftmittel auf der Flexplate dürfte das aber genauso schiefgehen wie bei der Ultrabase, weil da nichts mehr darauf hält sobald das Bett einige Grad abgekühlt ist.
Etwas Haftmittel, z.B. 3DLac (plus), kann auf der sehr praktischen PEI-Flexplate übrigens generell nicht schaden, wenn die Auflagefläche des Druckobjekts eher klein ist.
Welchen Vorteil dieser aufwändige Filamentsensor bringen soll, der erkennen kann, ob sich das Filament bewegt, weiß ich jetzt nicht wirklich. Aber: er verhindert zuverlässig die Nutzung von flexiblem Filament wie z.B. TPU, weil man dieses nicht mit der nötigen hohen Kraft hindurch schieben kann. Man kann ihn aber im Menü deaktivieren und dann sollte man ihn abbauen können…
Ganz nett sind die Führungsrollen für das Filament vor dem Sensor, so kann man es quasi aus jeder Richtung zuführen, wenn einem die Position der Spule auf der Verbindungsstrebe der Z-Achsen nicht gefällt. So weit oben so viel zusätzliches Gewicht hilft sicher nicht gegen Aufschwingen des Druckers bei schnellen Bewegungen besonders der Y-Achse, also des Betts mit dem Druckobjekt, aber leider ist das bei den Ender 3 Klonen so üblich.
Fazit:
Ein wirklich gut gelungener Ender 3 Klon, besser als sein Vorgänger in wichtigen Punkten (Bett, Extruder, Montage), besser als so mancher Konkurrent.
Außergewöhnlich hohe Druckqualität, nicht nur für seine Klasse.
Jetzt noch ein guter Preis: absolute Kaufempfehlung für Einsteiger, Fortgeschrittene wollen keinen Ender 3 (Klon) mehr.
Hier ist die Preisale-Aktion von Elegoo zu finden:
https://www.elegoo.com/collections/2022-elegoo-pre-orders
Und hier gibt’s einen extra Forenthread für weitergehende Diskussionen zu meinem Test und dem Drucker an sich: https://drucktipps3d.de/forum/topic/elegoo-neptune-3/
Moin,
habe den Drucker vor ein paar Tagen bestellt. Bin noch Neuling auf dem Gebiet.
Ich hoffe ihr nehmt es mir nicht krumm, wenn die ein oder andere Frge kommt.
Gruss Rudi
Hallo Rudi!
Nein, sicher nicht, dafür sind wir ja da.
Aber dazu bitte im Forum anmelden!
Dort existiert schon ein Sammelthread, aber Du kannst auch gerne ein eigenes neues Thema anlegen.
https://drucktipps3d.de/forum/topic/elegoo-neptune-3/
Der Vorteil von dem Filamentsensor wenn richtig ausgeführt wäre halt genau der das der sensor erkennt ob sich das filament bewegt und nicht nur ob es vorhanden ist oder nicht.
Zb wenn das hotend Verstopft ist ist filament vorhanden bewegt sich aber nicht.
Diese Art von sensor erkennt das und Pausiert den Druck dann.
Das hier der Anpressdruck der eine so stark ist das flexibles filament nicht richtig eingeführt werden kann ist natürlich blöd… Vielleicht kann man die Spannung der Feder etwas verringern?
Außer durch Kürzen der Feder kann man den Andruck leider nicht verringern.
Hallo Alex,
super Testbericht!
(mach mal Deinen Forenthread wieder auf 😉
Gruß Cfox
Mein Fehler.. ich geh aufmachen 🙂