RAMPS 1.4 Druckerupgrade mit Trinamic TMC2100 Stepper Treibern
Meine Beziehung zum Renkforce RF500 war von Anfang an etwas gestört – man könnte auch „lärmgeplagt“ dazu sagen. Glücklicherweise verwendet der RF500 ein stink normales RAMPS 1.4 Board, das man mit Trinamic TMC2100 Stepper Treibern upgraden kann. Also ran ans Werk.
Das RAMPS Board ist ein (uraltes) und spottbilliges AddOn, um zusammen mit einer Arduino Mega Platine eine einfache Steuerung für i3 ähnliche 3D-Drucker zu realisieren. Man bekommt das RAMPS 1.4 heute in China schon unter 5 Euro, ein Arduino Mega kostet auch nicht viel mehr.
Es ist heute eigentlich nimmer unbedingt zeitgemäß und man findet es nicht mehr oft in aktuellen Druckern, aber wer noch eines hat, oder seinen RAMPS basierten Drucker etwas aufwerten möchte, der kann beim RAMPS 1.4 sehr einfach die Stepper Treiber tauschen, z.B. eben zu den Trinamics TMC2100
Bezugsquellen – woher nehmen?
Trinamics TMC2100 basierte Schrittmotortreiber in der „SilentStepStick“ Bauform gibt es zum einen als hochwertige Ausführung bei Watterott.de oder aber als minimal billigere Chinaware FYS TMC2100 bei Amazon.de.
Ich habe mich für die Watterott Version Made in Germany entschieden. Für das RAMPS 1.4 Board empfiehlt Watterott die blaue 5V Variante. Entsprechend bezieht sich das Folgende im Zweifel ausschließlich auf diese SilentStepSticks von Watterott.
Für 2 Euro Aufpreis kann man die bei Watterott schon fixfertig gelötet bekommen, wer sich verklickt oder schwäbisch angehaucht ist, muss sich die Beinchen noch selber dran löten. Wichtig dabei ist: die Platine wird mit der bestückten Seite nach unten eingebaut, also müssen die Beinchen auch entsprechend falsch rum — langes Ende zur bestückten Seite angelötet werden.

Bestückte Seite kommt nach unten
Und: es wird mindestens ein passiver Kühlkörper benötigt, der per Wärmeleitpad auf die Board-Oberseite aufgeklebt wird.

Watterott 5V Version des Silentstepsticks + Kühlkörper
Konfiguration der TMC2100 SilentStepSticks
Der TMC2100 kann in unterschiedlichen Konfigurationen betrieben werden. Es gibt zum einen den ultra-leisen Betriebsmodus, „SilentChop“ genannt, dem fehlt es allerdings ein bissl an Kraft – oder aber den „SpreadCycle“ genannten leistungsfähigeren Modus, der aber immer noch recht leisen Betrieb ermöglicht. Dazu kommen unterschiedliche Möglichkeiten bei „Zwischenschritte“ und deren Interpolation. Schwere Kost, das zu erklären trau ich mich gar nicht erst zu versuchen 😉
Für einen normalen i3 ähnlichen Drucker wird der SpreadCycle Modus mit 16 interpoliert auf 255 Zwischenschritte empfohlen. Wie man das nun einstellt, dazu gibt es viele Anweisungen:
- die gängigste Empfehlung ist es, die Beinchen für die Pins CFG1-3 gar nicht erst anzulöten und statt dessen eine kleine Drahtbrücke von Pin CFG1 zu GND einzulöten.

Konfigvariante: ohne 3 Beinchen, mit Drahtbrücke
Der SilentStepStick wird so fix auf den Spreadcycle 16/256 Modus eingestellt, egal wie das Board konfiguriert ist. Fand ich jetzt nicht so prickelnd, hat aber den Vorteil, dass die Konfiguration auch für andere Boards als dem RAMPS funktioniert.
- Da ich aber eben ein RAMPS benutze und kein anderes Board, habe ich mich für die einfachere Methode entschieden: ich habe alle Beinchen angelötet, keine Drahtbrücke gebastelt und statt dessen alle 3 Jumper in der Mitte des jeweiligen Sockels auf dem Board abgezogen. (Wer die fertig gelöteten SilentStepSticks bei Watterott kauft, muss also gar nicht löten). Das Resultat ist das Selbe: Spreadcycle 16/256 und ich kann immer noch durch die Jumper auf dem Board die Konfiguration ändern, wenn ich das möchte.
EDIT: Ich schreibst jetzt nochmal FETT dazu, weils anscheinend nicht gelesen wird: dieser Konfigvorschlag ist von mir nur in dieser Kombi Watterott 2100 und dem Ramps1.4 des RF500 getestet, bei den China TMC2100, anderen TMC oder anderem Board geht es womöglich so nicht, bzw. hab ichs nie angeschaut, kann ich also nix sagen.
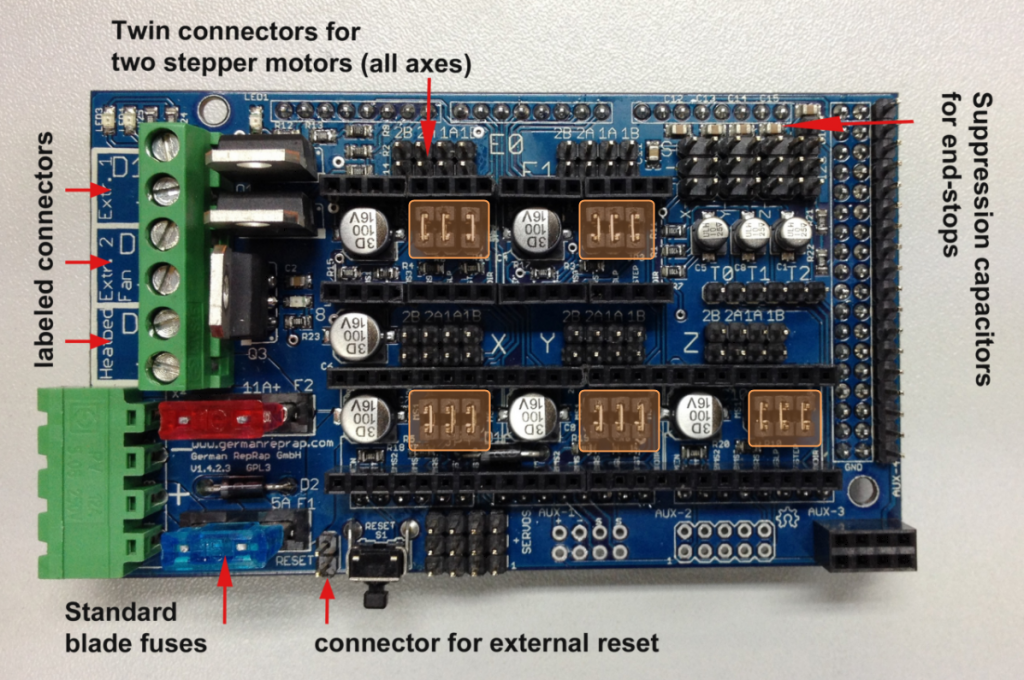
Orange umrahmt die Jumper, die man entfernen müsste, wenn der Treiber getauscht wird
Bildquelle: ReprapIndia – http://reprap.org/wiki/RAMPS_1.4

Einbau im RAMPS Board
Hier beim Renkforce RF500 waren bisher Allegro 4988 „StepSticks“ im Einsatz, die fertig verlöteten SilentStepSticks werden im Vergleich zu den Allegro um 180° gedreht, also mit dem Justier-Poti zur anderen Seite hin eingesteckt. Verlasst Euch aber nicht auf das Drehen, schaut Euch die Beschriftung auf der Treiberplatine und auf dem Drucker Board an. Nehmen wir den mit DIR bezeichneten Pin, der soll am Ende auch auf dem Board im Loch für den DIR Pin stecken.
Poti des SilentStepSticks zeigt zum Netzteilanschluß (nicht im Bild, links)
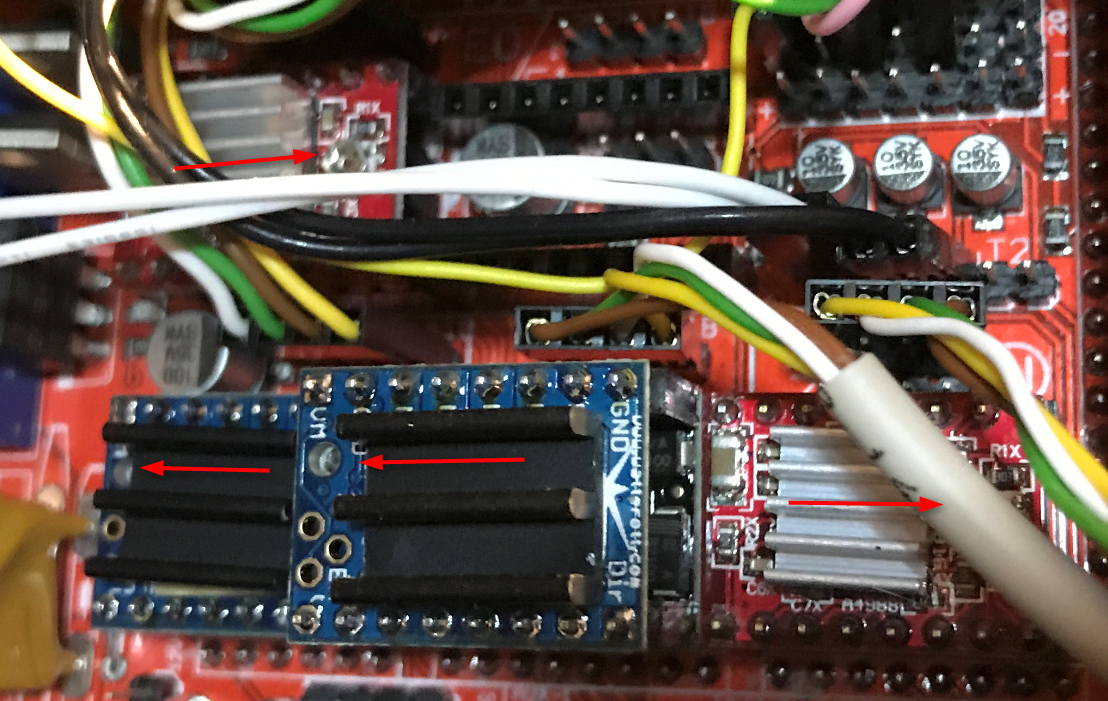
Ich empfehle, eine Achse nach der anderen zu machen und vor dem Einsetzen des SilentStepSticks erst mal die kleine Schraube des Potis von „oben“ der Boardrückseite betrachtet etwas (1/4 Drehung) gegen den Uhrzeigersinn – nach Links – zu drehen, um den Motorstrom gleich schon mal etwas zu drosseln.

Nach Links reduziert den Motor Strom
Danach setzt Ihr den SilentStepStick für diese Achse ein, schaltet den Drucker ein, und wichtig: schaltet die Stepper im Druckermenü aus (oder bei ausgeschaltetem Drucker(!) zieht das Motorkabel ab) und justiert die Stepperspannung durch Drehen der kleinen Schraube mal auf so ca. 0,75V. Von oben drauf geschaut nach links gegen den Uhrzeigersinn gedreht verringert die Spannung, nach rechts im Uhrzeigersinn erhöht sie, es reichen minimale Bewegungen um wenige Grad. Grundsätzlich: mehr wie 1,0V soll es im RAMPS1.4 nicht werden.
Messen tue ich die Spannung mit dem Multimeter Plus auf die Schraube des Potis und Minus am GND Pin – im Bild der im rechten oberen Eck. Ist die Spannung zu gering, bekommt der Stepper zu wenig Strom und es kann zu Schrittverlusten kommen, ist die Spannung zu hoch, werden Stepper und Treiber zu heiß, im dümmsten Fall raucht uns das Board ab. Ideal ist die geringst mögliche Spannung einzustellen, bei der der Drucker ordentlich funktioniert, ohne Schritte zu verlieren – aber das ist dann Feintuning für später, wir schalten den Drucker erst mal wieder aus setzen erst mal den nächsten SilentStepStick ein.
Im Vergleich zum Allgero 4988 invertiert sich die Laufrichtung des Motors bei Verwendung des TMC2100, dies kann entweder in der Firmware angepasst oder hier beim RAMPS durch simples Umdrehen des Steckers für das Motorkabels erreicht werden: Stecker abziehen, 180° gedreht wieder drauf stecken, fertig.
Ich hab im RF500 jetzt erst mal nur X & Y getauscht, es reichen also 2 der SilentStepSticks aus, Z und den Extruder halte ich jetzt für nicht so wichtig, da kann auch der alte Allegro weiter laufen. Das Mischen ist kein Problem und bei nem Preis von ca. 10 Euro pro Achse spart man auch bissl.
Was hat es gebracht?
-
- der Drucker (aktuell ja nur die X & Y Achse) ist *erheblich* leiser geworden und Vibrationen merklich reduziert.
- Das Druckbild zeigt weniger Artefakte, hat sich ingesamt verbessert auch bei gut 50% höherer Geschwindigkeit.
- im Ruhezustand bei eingeschalteten Stepper jedoch deutlich höheres Stepper-Fiepen und ein leichtes Rauschen,
- aber auch (selbst erlebt beim RF500) bei manchen Stepper-Motor-Fabrikaten in einem 12V System ein erhebliches Rauschen, dass den Geräuschvorteil fast zunichte machte, hier half dann nur der Tausch des Steppers, dann war endlich die ersehnte Ruhe..
Ich habe eine Reprap-Variante mit NEMA 17-Motoren und RAMPS 1.4 („Protos“ von German Reprap) und nun die TMC2100 auch verbaut (nur X und Y) und jeweils alle 3 Jumper entfernt. Damit haben die Motoren (auch bei korrekter Stromeinstellung) gepfiffen und gefiept wie verrückt – komplett unerträglich.
Wenn man den TMC2100 mit allen Pins angelötet so einbaut läuft er im spreadCycle-Modus, da der CFG1-Pin über einen Pulldown-Widerstand (100 kOhm bei meinem RAMPS) auf GND liegt.
Aus der Doku zum Stepstick geht hervor, dass CFG1 „open“ sein muss um im stealthChop-Modus zu laufen. Nachdem ich also den Pin am CFG1 ausgelötet hatte, liefen die Motoren praktisch unhörbar. Natürlich haben sie etwas weniger Power und anfangs kam es zu Schrittverlusten, aber die konnte ich durch Reduzieren der Acceleration beseitigen (3000 mm²/s muss nun wirklich nicht sein). Die Referenzspannung ist auf 1 V eingestellt. Die Motoren und auch die Stepstick-Kühlkörper werden nur handwarm.
Der Drucker ist jetzt superleise – das nervige stundenlange Gedudel der Motoren hat endlich aufgehört.
Hallo zusammen
Kann mir einer sagen welche Einstellung ich bei meinen schritmotoren Treiber machen muss. Ich weiß ja nicht ob es allgemeine Einstellung gibt. Ich habe einen Zonestar Z8XM2. Vermute das es auch die selben Einstellungen sind wie bei dem Zonestar Z5F. Meinen Motoren brumen das nervt und sind echt laut bei schnellere Bewegung. Bin gerade am messen der Treiber. Diese liegen bei 0,9 Volt mal etwas mehr mal etwas weniger
Danke für eure hilfe
Hallöchen,
Ich habe heute meine tmc2100 eingebaut und auch gleich wieder ausgebaut. Sobald sie Spannung versorgt wurden gab es einen extrem nervigen hohen Ton. Das „normale“ Summen beim Verfahren war zwar weg, aber dieser Ton… schrecklich!
Kann mir jemand nen Tipp geben, woran das liegen könnte?
Hatte ich auch, ja. 2 Tipps kann ich dir geben:
1) mal nen anderen Stepper Motor testen, die pfeiffen nicht alle gleich.
2) die Versorgungsspannung der TMC2100 auf Richtung 24V erhöhen
Danke für die schnelle Antwort!
1) alle meiner 3 nema‘s pfeifen so wiederlich.
2) okay, also quasi den Ton noch höher machen, so dass man ihn nicht mehr hört?
Das hört sich nach einer Menge Arbeit an,…. dachte das habe ich hinter mir!
Was genau da passiert wenn man die Spannung erhöht, weiss icht nicht.
Der Tipp, den man mir gegeben hatte, war die Pins am Board des Treibers hochzubiegen, und dann 24V da dran zu machen, Notfalls so ein StepUp DC-DC Konverter für zwei fuffzig dazu ans Netzteil ran hängen.
Da ich noch 2 Stepper mit ähnlichen Daten hatte, die leise waren am TMC2100, hab ich die dann benutzt, die stammten aus nem China Bastelkit, das sonst zu nix zu gebrauchen war.
Hi,
das RAMPS 1.5 hatte ich von AliExpress: https://www.aliexpress.com/wholesale?catId=0&initiative_id=AS_20171112014605&SearchText=ramps+1.5
Ich habe den CR-10 umgerüstet und daher musste die verbaute Steuerung raus. Evtl. werde ich nochmal auf 24V nachrüsten, um das Heatbead schneller ‚hoch‘ zu bekommen. Dafür eignet sich leider das 1.4er besser, beim 1.5er muss man eine SMD-Diode aulöten, was immer etwas schwieriger ist.
Ich denke mal, die Umbauerei ist nicht jederman’s Sache, da auch am Ghäuse der Steuerung gearbeitet werden musste (großer Außenlüfter, Bohrung für Bedienelement, da das Display getauscht wurde, Herausführen des Card-Slots über einen Adapter, und, und, und…). Letztendlich waren die Anpsassungen so umfangreich, dass mir mit einem Rohgerüst mehr geholfen wäre :-).
Aber bitte nicht falsch verstehen:
Ich halte den CR-10 wirklich für ein klasse Gerät, gerade für Anfänger (ich bin Anfänger mit Handwerker- und Löthintergrund).
Aus einem alter Kickstarter Projekt habe ich auch noch ein ReArm Board liegen (zum Austausch des Arduinos)… Wenn ich das mit einem Wifi-Modul gekoppelt bekomme (z.B. ESP – Board), werde ich nochmal Hand anlegen.
Ihr seht, ich bin eher der Experimentierfreudige 🙂
Hi Michael,
danke für Dein Feedback.. Ich hab bei mir die Bastelei mit dem Ramps grad mal etwas zurückgestellt – aber im Prinzip sind das in der Tat die Schritte, die da auch bei mir aufn Plan kommen werden, also dann gleich noch 24V hinterher und dann neues Gehäuse, weils nimmer passt.. Allerdings bin ich eher Bastelmuffel wenns sich vermeiden lässt 😉
Der Hochfrequenz Ton bei den TMC2100 im spreadcycle Modus lässt sich auch durch eine separate Versorgung der VM mit meh als 12V erreichen. Ich habe bei meinen TMC2100 die Pins für VM und GND nach oben verlötet und versorge alle über einen 12->35V step up Converter mit mit 35V Spannung. wobei die TMC2130 schon auf einem Testboard verbaut sind und in kürze die TMC2100 ablösen werden
Moin Richard,
vor dem Umbau mit separaten Spannungsversorgung scheu ich mich immer noch, das war schon sehr viel mehr Basteln, als ich „Fertigdruckerkäufer“ jemals wollte. 😉
Aber es scheint, überall wohin man schaut, findet man Sachen, die man besser machen müsste.. Gibts eigentlich nich Drucker, die out of the Box fixfertig sind? 😉
Hi,
die 2130er von Trinamic haben den Vortteil, dass sie auch über I2S programmiert werden können. Auch Statusregister hat das Teil und man kann erkennen, ob der Motor blockiert. Dadurch kann man den Druck anhalten und später weitermachen – ganz neue Möglichkeiten. Es gibt sogar einen Marlin Fork mit entsprechender Anpassung (nutzt nicht alle Fähigkeiten der Programmierung aber viele). Infos auch hier: https://hackaday.com/2016/09/30/3d-printering-trinamic-tmc2130-stepper-motor-drivers-shifting-the-gears/
Ich habe mir ein RAMPS 1.5 besorgt (Mosfets liegend verlötet, keine rückstellenden Sicherungen mehr, sonst wie 1.4). Sicher, etwas altbacken aber billig und die Endstufen kann man tauschen. Und ich konnte ein altes Mega 1280 Borad recyclen…
Gruß
Michael
Hi Michael
mir persönlich ist der Aufwand für TMC2130 in meinen Bastel-Druckern zu groß, aber fixfertig im MK3, also wo ich nicht dran fummeln muss und auch die FW schon fertig ist, ja, da nehme ich die gerne 🙂
Aber sag mir, wo hast Du das RAMPS 1.5 bestellt? Ich weiß das German Reprap mal welche hatte, aber German Repraps Webshop ist offline und ich finde keine andere Bezugsquelle
Hallo Stephan,
JP wirbt ja auch mit Trinamic2130 am MK3 ohne das ich mir bislang etwas darunter vorstellen kann außer das es mit schnellerem und leiserem Druck beworben wird. Sehe ich das richtig, daß die Motoren in irgend einer Wese intelligenter angesteuert werden um Vibrationen zu verringern. Ist außer der Hardwareanpassung irgend eine Anpassung der Firmware oder Software erforderlich?
Die China-Boards werden in irgend einer Weise alle mit Ramps 1.4 bezeichnet und ich nehme an, das bei allen scheinbaren Unterschieden die tatsächlichen Unterschiede eher gering sind. Die Großzahl der Boards hat die Steppertreiber bereits an Bord. Ein Austausch ist da also nicht möglich. Man könnte also ein teures Board wie RAMBo kaufen oder ein extrem günstiges und selber Hand anlegen. In den Beschreibungen der üblichen Boards in den Chinaläden ist nichts von Trinamic zu lesen woraus ich schließe, da ist auch nichts vergleichbares enthalten?
So ganz verstehe ich auch noch nicht, wieso die TMC2100 Treiber so viel Unterschied machen, aber der Unterschied gerade beim RF500 ist echt gewaltig.
Die Treiber von Watterott sind bewusst so gebaut, dass die 1:1 austauschbar mit den Pololu Treibern sind, einem alten quasi Standard aus der RepRap Welt um 2011(?). Gingen wohl recht gerne kaputt, daher die Bauform als einfach zu tauschende Modul. Der Austausch geht ohne Änderung der Firmware oder sonstigen Settings, ledigliche die Jumper auf dem RAMPs müssen geändert werden (bei anderen Boards weiss ichs nicht)
Die „StepSticks“ wie sie im RF500 benutzt werden waren dann Nachbauten der Pololu – und die „SilentStepStick“ von WatterOtt eine Variante davon mit den Trinamic Chips (es gibt da mehrere Varianten von Trinamic). Alternativ gibts so Module auch mit TexasInstruments DRV8834 Chip oder eben die nur halb so teuren Allegros und paar Exoten, die genauen Unterschiede und was nun wozu am Besten ist, weiß ich nicht. Die Reprap Szene ist mir etwas.. fremd. (Ich mag Akkuschrauber genauso gerne wie 3D-Drucker, beides kaufe ich möglichst gebrauchsfertig)
Es gibt wohl noch ein paar Boards MKS Gen 1.x z.b., GT2560, Lerdge oder Rumba, aber ich seh bei unserer „Drucker-Klasse“ überwiegend Boards mit fest verbauten Treibern in der Regel Allegro 49xx. Grund dürfte sein: TMC ist gut doppelt so teuer, wird also bei den China Druckern eher nicht benutzt, mit wenigen hochpreisigen Ausnahmen.
Wenn Meister JP nun beim MK3 auf TMC2130 setzt, ist das meiner Meinung definitiv positiv und macht schon etwas Neugierig auf das neue Board. Ich hätte nicht geglaubt, dass das so nen Unterschied machen kann.
Die Boards sind im großen und Ganze schon untereinander tauschbar, wenn die passende Firmware existiert und die Spannung zum Rest des Druckers passt.